- Smarter Worldブログ
- 分散型レーダー・アーキテクチャを評価すべき4つの理由とは
分散型レーダー・アーキテクチャを評価すべき4つの理由とは
自動車メーカーは、新しい先進運転支援システム (ADAS) アーキテクチャの性能を高め、システムの最適化を進めて、ソフトウェア・デファインド・ビークル (SDV) に容易に移行できるよう、さまざまなレーダー実装の可能性を探っています。その開発に役立つリファレンス・デザインが、新しいNXP PurpleBoxです。
ソフトウェア・デファインド・ビークル (SDV) への移行に向けて、自動車メーカーは最新のレーダー・センサの性能をフルに引き出すために、ソフトウェアのメンテナンスとアップデートをより容易に行える手段を必要としています。同時に、アクティブ・セーフティ技術の発展により自動車に搭載されるレーダー・センサの数が増え、コストと複雑さが増大しています。これに拍車をかけるのがADASアーキテクチャの多様化であり 、将来的な要件に対応するためのソリューションがますます求められるようになっています。
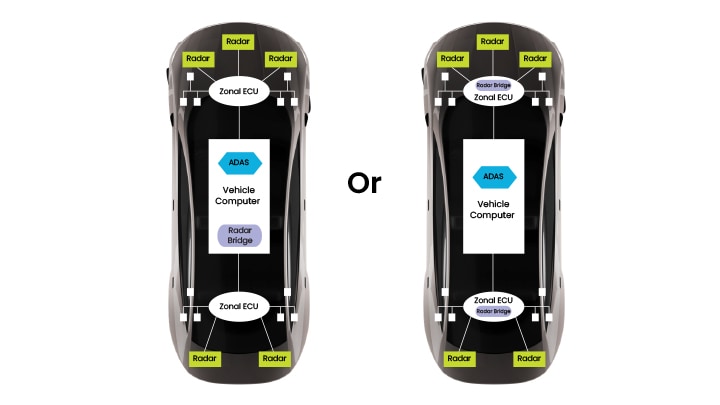
エッジにインテリジェント・センサを配置するエッジ・レーダー、エッジから離れたコプロセッサにインテリジェンスを集約させた分散型レーダー、セントラル・コンピューティング・システムにインテリジェンスを集約させる一元化はすべて、自動車メーカーが検討しているアーキテクチャの選択肢です。中でも、分散型レーダー・アーキテクチャは最も有望な選択肢の1つです。このアーキテクチャは、複数のレーダー・センサのアーリー・フュージョンによってレーダー・アーキテクチャを進化させ、性能を大幅に向上させるというOEMの目標の達成に役立つだけでなく、カメラとレーダーが認識する情報を明確に分離できます。
レーダー・センサの性能を最大限に引き出しましょう。このホワイト・ペーパーでは、ADASアーキテクチャとレーダー・プロセッシングについて解説しています。
最適化されたレーダー・ブリッジの利点
複数のセンサから得られたデータを集約するレーダー・ブリッジは、プロセッシング性能を最適化し、センサの入力を統合化できるため、さまざまなメリットをもたらします。レーダー・ブリッジによってOver-the-Airアップデートが可能になるため、各センサを個別にアップデートする必要がなくなり、システムのメンテナンスが容易になります。また、高度な角度検出に対応する最先端のアルゴリズムを組み込むことができ、位置検知が可能になります。これは、現在のエッジ・レーダー・システムでは処理能力に限界があるため実装できない機能です。レーダー・ブリッジに基づくアーリー・フュージョンは、性能を大幅に高め、レーダー・センサからより多くの情報を引き出す可能性をもたらし、ADASのエクスペリエンス改善につながります。このプラットフォームでAL/MLを活用することで、アーリー・センサ・フュージョンの改善やセンサ分解能の向上に加え、レーダー出力の性能を大きく高めることができます。
レーダー・ブリッジに適切なソフトウェアを組み合わせることで、以下のメリットが得られます。
効率的な信号処理
レーダー・ブリッジは複数のレーダー・センサから最初のFFTデータを取り込み、統合化されたポイント・クラウドを生成します。視野が重なり合う複数のレーダーのデータを統合することで、非常に大きな効果が得られます。交通状況を複数の角度から認識することで検出精度が高まるため、偽陽性および偽陰性の検出が減り、ADAS機能の安全性が向上します。
低レイテンシ
レーダー・ブリッジの処理リソースを他の機能と共有する必要がない「モノタスク」であるため、結果として低レイテンシが実現します。処理済みのポイント・クラウドが即座に得られるため、危険な交通状況が発生したときに自動車が瞬時に反応できます。
干渉管理
レーダー・ブリッジは、すべてのレーダー・センサの入力データを同時に分析し、信号が干渉の影響を受けているセンサを特定できます。ブリッジのソフトウェアにより、干渉を受けているセンサに他の周波数またはタイムスロットを割り当て、レーダー・センサが干渉のないクリーンな信号を再度生成できるようにします。これは誤った情報に基づいて経路やアクションを計画することを回避するために役立ち、自動車とその周辺の交通環境の安全に貢献します。またレーダー・ブリッジによって、他の車のレーダー通信との干渉によって損なわれたレーダー信号を再構成することもできます。この再構成は、レーダー・ブリッジに搭載されたニューラル・ネットワーク・アクセラレータで動作する機械学習モデルによって行われます。
垂直方向速度
レーダー・ブリッジでは、検出された物体の垂直方向の速度成分も測定できます。レーダーはドップラー効果を利用して物体の半径方向速度を瞬時に測定できます。2つのレーダーのデータを組み合わせることで、2つの異なる角度の半径方向速度ベクトルから垂直方向速度を導き出すことができます。このように1回の検出で真速度を瞬時に測定できるため、ポイント・クラウドの品質が向上します。これにより、高速道路での車線変更、急な割り込みや追い越し、歩行者の飛び出しなど、安全確保に困難が伴う交通状況での性能が向上します。
レーダー・センサの管理
レーダー・センサと視覚センサのテクノロジは、ADASやADのユース・ケースを実現するために必要な認識能力を提供します。全天候に対応し、幅広い照度条件に対応する安定性を備え、かつ低コストのレーダーは、あらゆるADASシステムにおいて重要な役割を果たします。レーダーから得られる情報を増やすことで、ADASシステムは今日導入されているソリューションよりも、全体的なパフォーマンスとエクスペリエンスを大幅に高めることができます。
ゾーン型またはセントラル型のセンサ・データ処理を可能にする分散型レーダー・アーキテクチャは、センサの機能とセンサ・フュージョンを管理する高度な手法であり、次世代のレーダー・センサの潜在能力を引き出すために不可欠です。上で説明したレーダー・ブリッジは、ゾーン型またはセントラル型のプロセッシング・プラットフォームで得られたレーダー・センサのデータを処理して統合化し、それを視覚認識データとさらに統合することができます。このタイプのレーダー・プロセッサは幅広い用途に対応し、ポイント・クラウドとレーダー・オブジェクトのどちらも出力できます。レーダー・ブリッジは、セントラルECUの視覚処理プロセッサやゾーンECUのゾーン・コントローラと同じ場所に配置できます。
PurpleBoxリファレンス・デザイン
このたびNXPは、リファレンス・デザイン「PurpleBox」を開発しました。この製品は、分散型レーダー・アーキテクチャの概念を評価する際や、アーリー・レーダー・フュージョンを導入する際に役立ちます。このリファレンス・デザインは26 TOPSの性能を誇るHailo製の機械学習アクセラレータを使用したAI拡張機能を備え、レーダー・データをまったく新しい方法で活用することができます。
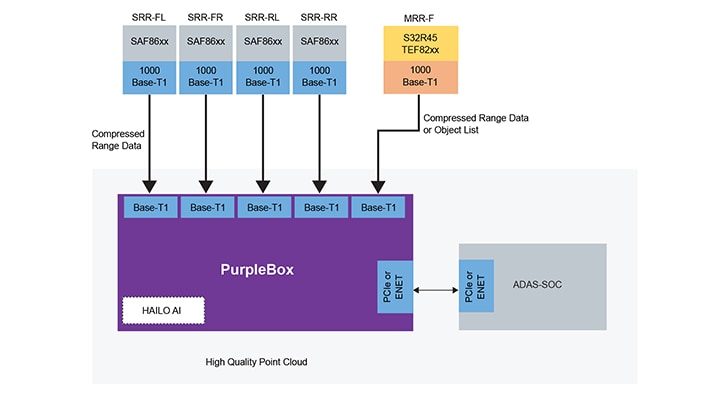
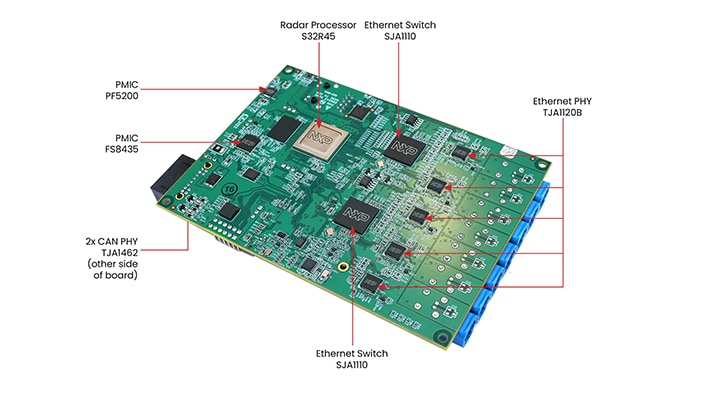
PurpleBoxはリファレンスECUとして使用でき、NXPのS32R45レーダー・プロセッサに基づくレーダー・ブリッジの概念実証の主要コンポーネントです。4個のコーナー・レーダー・センサの信号を処理でき、圧縮されたRange FFTデータを受け取って、高密度のサラウンド・ポイント・クラウドを生成します。PurpleBoxには、ドライバやOSなどが統合された総合ソフトウェア開発環境が付属しています。これに含まれるデモ・アプリケーションをプラットフォームの評価に使用できるだけでなく、統合済みのソフトウェアを再利用して独自のプロセッシング・チェーンを開発することもできます。また、マス・ストレージ・デバイスを接続できるM.2 PCIeインターフェースや、レーダー認識のための高度なAI拡張機能に対応するHailo-8機械学習アクセラレータも搭載されています。
PurpleBoxは、NXPの実績あるS32プロセッサ・プラットフォームに基づいて構築されており、お客様は複数の分野で同じソフトウェアを活用できます。PurpleBoxは、最近発表されたS32 CoreRideプラットフォームをベースにしています。このプラットフォームではハードウェアとソフトウェアが統合されているため、お客様は効率的に分散型レーダー・アーキテクチャの評価とアプリケーション開発に集中しすることができます。
動作をお試しください
NXPは、従来の車両アーキテクチャから新しいADASアーキテクチャへの移行を支援しています。自動車メーカーは分散型レーダー・アーキテクチャにより、センサ・ネットワーク全体から得られた情報を活用できるようになります。各センサから得られた高精細のローレベル・センサ・データをコプロセッサが処理することで、アーリー・レーダー・フュージョンと高度なレーダー認識処理が可能になります。NXPの次世代のレーダー・プロセッサは、このようなアーキテクチャを実現するとともに、運転の安全性と快適性を向上させるように設計されています。レーダー・ブリッジの持つ可能性を探求する自動車メーカーやTier 1サプライヤー向けに、NXPのPurpleBoxリファレンス・デザインが発売されました。
著者紹介

Karthik Ramesh
Karthik Rameshは、次世代の自動運転に不可欠なADASシステム・ソリューションのマーケティング責任者です。テクノロジーに情熱を注いでおり、NXPとBoschで15年以上にわたり自動車業界関連の仕事に従事しています。

Kees Gehrels
Keesは1988年にPhilipsに入社し、テレビ・システム部門にてキャリアを積んだ後、2007年にNXPのオートモーティブ事業のシステム/アプリケーション・マネージャに就任しました。NXPにおける2012年のレーダー事業立ち上げを率いたパイオニアの1人であり、現在もレーダーのイノベーションとNXPの交通事故ゼロ・ビジョンを実現するための事業の展開に情熱的に取り組んでいます。

Andrew Robertson
Andrew Robertsonは、レーダーのカスタマー・アプリケーション・サポート責任者として豊富な経験を有しています。Motorola/Freescaleで実務を経験した後、2002年にNXPに入社し、車載マイクロコントローラ部門で複数の職務を担当しました。当初からレーダー・テクノロジに興味を抱き、優れたレーダー・エンジニアとして成長しました。その深い技術知識を活かしてレーダー部門のマネージャとしてリーダーシップを発揮し、チーム内でイノベーションとコラボレーションを促進しました。技術的なノウハウとリーダーシップのスキルを駆使してお客様を成功に導くことに注力しており、お客様のニーズに寄り添いながら、レーダーの開発に対して卓越したサポートを提供しています。