MIMXRT1020-EVKのスタート・ガイド
このドキュメントの内容
-
接続
-
ソフトウェアの入手
-
ビルドと実行
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

お客様の i.MX RT1020評価キット



2. ソフトウェアの入手
2.1 開発方法を選択する
MCUXpressoソフトウェア開発キット (SDK) + 統合開発環境 (IDE)
- SWDとJTAGによるデバッグ・サポート
- 柔軟性の高いソフトウェア
- ペリフェラル・ドライバ一式(ソース・コードあり)
- アプリケーション・サンプルとプロジェクト・ファイル
Zephyr™ OS
- 拡張性に優れたオープンソースのリアルタイム・オペレーティング・システム (RTOS)
- 複数のハードウェア・アーキテクチャをサポート
- リソースに制約のあるデバイス向けに最適化
- セキュリティを重視した設計
詳細については、 Zephyr OSデベロッパ・ウェブサイトをご覧ください。
2.2 MIMXRT1020-EVK用ソフトウェアをインストールする
2.3 MCUXpresso SDKですぐに設計を開始する
MCUXpresso SDKは無償で利用することができ、オープンソースのライセンスに基づいて、すべてのハードウェア抽象化およびペリフェラル・ドライバ・ソフトウェアのソース・コード全体が提供されます。SDKの詳細はこちら。
下のボタンをクリックして、MIMXRT1020-EVK用に事前設定済みのSDKリリースをダウンロードしてください

オンラインのSDK Builderにアクセスし、提供されているSDKビルダを使用してMIMXRT1020-EVK用のカスタムSDKパッケージを作成することもできます。
2.4 ツールチェーンをインストールする
NXPは、MCUXpresso IDEというツールチェーンを無償で提供しています。
 MCUXpresso IDEの入手
MCUXpresso IDEの入手 別のツールチェーンを使用したい場合は?問題ありません。MCUXpresso SDKは、IAR、Keil、コマンドラインGCCなどの他のツールをサポートしています。

2.5 PCを設定する
サンプル・アプリケーションの多くは、マイクロコントローラのUARTを介してデータを出力します。ボードの仮想COMポート用ドライバがインストールされているか必ず確認してください。ドライバのインストーラを実行する前に、ボードをPCに接続しておく必要があります。
ドライバのダウンロード
シリアル・ポート・ドライバをインストールした状態で、お好きなターミナル・アプリケーションを実行し、マイクロコントローラのUARTからのシリアル出力を確認します。ターミナルをボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。MIMXRT1020-EVKの仮想COMポートのポート番号を確認するには、デバイス・マネージャを開き、「Ports(ポート)」グループでポートを探します。
ターミナル・アプリケーションの使用方法がわからない場合は、Tera TermチュートリアルまたはPuTTYチュートリアルのいずれかのチュートリアルをお試しください。
3. ビルドと実行
3.1 MIMXRT1020-EVKでのSDKデモのビルドと実行
3.2 MCUXpresso SDKサンプル・コードを確認する
MCUXpresso SDKには、サンプル・アプリケーション・コードが豊富に用意されています。利用可能なコードを確認するには、SDKをインストールしたフォルダのSDKボード・フォルダを参照し、ボードMIMXRT1020-EVKを選択します。
1/boards/evkmimxrt1020 .特定のサンプル・コードの詳細については、サンプルのディレクトリにあるreadme.txtファイルを開いてください。
3.3 MCUXpresso SDKサンプルのビルド、実行、およびデバッグ
興味のあるデモ・アプリケーションやドライバのサンプルがいくつかあれば、それをビルドおよびデバッグする方法を知りたくなることでしょう。MCUXpresso SDKのスタート・ガイドでは、SDKでサポートされているすべてのツールチェーンのデモを設定、ビルド、およびデバッグする方法について、わかりやすく手順に沿って解説しています。
以下のガイドを参照し、MCUXpresso IDEでサンプル・アプリケーションを開いてビルドやデバッグを行う方法を習得してください。
MCUXpresso IDEを使用する
MCUXpresso SDKのインポート
- MCUXpresso IDEを開きます
- コンピュータでワークスペースのディレクトリを選択します。

- MCUXpresso IDEウィンドウ内のビューを[Installed SDKs(インストール済みSDK)]に切り替えます。

- Windowsエクスプローラを開き、EVK-MIMXRT1020 SDKのzipファイルを[Installed SDKs(インストール済みSDK)]ビューにドラッグ・アンド・ドロップします。
- 次のプロンプトが表示されます。[OK]をクリックしてインポートを続行します。

- インストールされたSDKは、以下に示すように[Installed SDKs(インストール済みSDK)]ビューに表示されます。

サンプル・アプリケーションのビルド
-
左下隅にある「Quickstart Panel(クイックスタート・パネル)」を確認します

-
その中の[Import SDK example(s)...(SDKサンプルのインポート)]をクリックします。

-
サンプルをインポートして実行させるボードとして「evkmimxrt1020ボード」をクリックして選択し、[Next(次へ)]をクリックします。

-
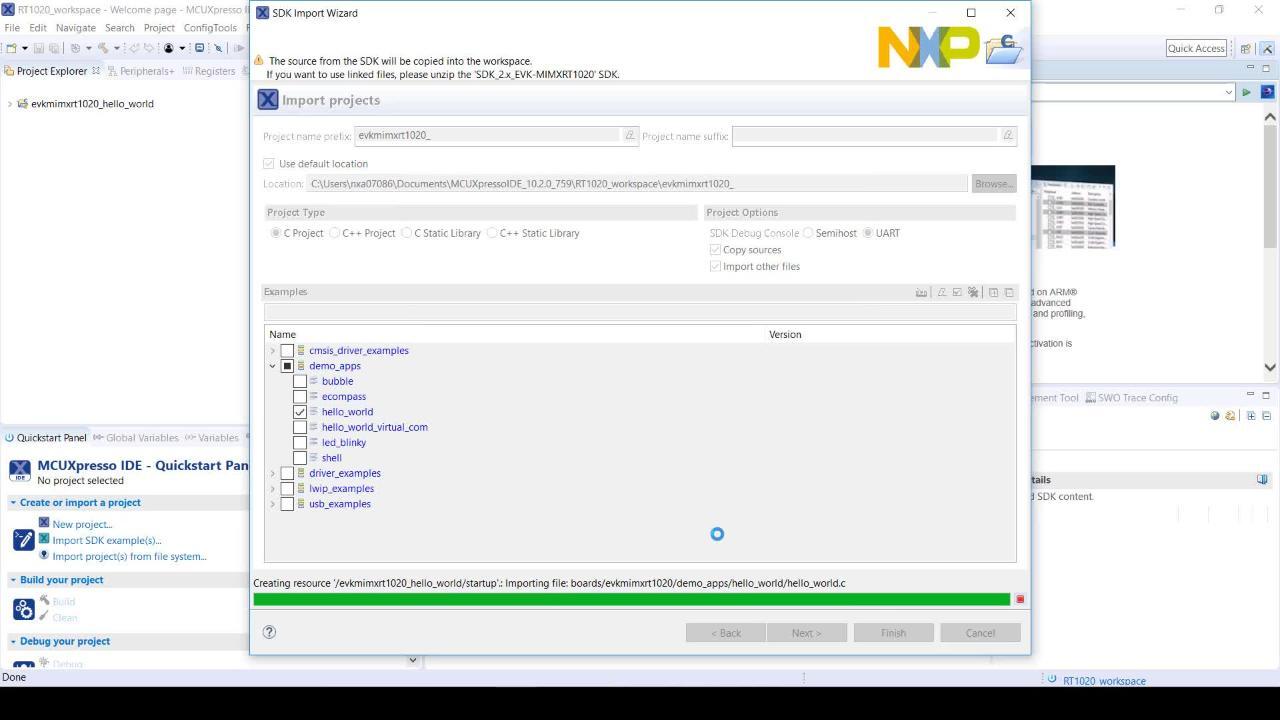
矢印ボタンを使用して[demo_apps]カテゴリを展開し、hello_worldの横にあるチェックボックスをクリックしてそのプロジェクトを選択します。[SDK Debug Console(SDKデバッグ・コンソール)]として[UART]が選択されていることを確認してください。次に、[Finish(完了)]をクリックします。

-
ここで、プロジェクト名をクリックし、[Build(ビルド)]アイコンをクリックして、プロジェクトをビルドします。

-
ビルドの進捗状況は[Console(コンソール)]タブで確認できます。

サンプル・アプリケーションの実行
- プロジェクトがコンパイルされたので、ボードにフラッシュしてプロジェクトを実行できます。
- MIMXRT1020-EVKのOpenSDAデバッグ・コネクタにUSBケーブルが接続されていることを確認し、「Quickstart Panel(クイックスタート・パネル)」の[Debug(デバッグ)]をクリックします。

-
MCUXpresso IDEは接続されたボードを検出します。MIMXRT1020-EVKに統合されたOpenSDA回路の一部であるCMSIS-DAPデバッグ・プローブが検出される必要があります。[OK]をクリックして続行します。

-
ファームウェアがボードにダウンロードされ、デバッガが起動します。

-
ターミナル・プログラムを開き、ボードが列挙したCOMポートに接続します。ボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットを使用します。
-
[Resume(再開)]ボタンをクリックして、アプリケーションの実行を開始します。

-
hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください。

-
命令の一時停止、ステップ・イン、ステップ・オーバーを行うにはメニュー・バーのコントロールを使用します。デバッグ・セッションを停止するには、[Terminate(終了)]アイコンをクリックします。

別のツールチェーンを使用する場合:
IAR EWArmを使用する
サンプル・アプリケーションのビルド
次の手順に従ってhello_worldサンプル・アプリケーションを開きます。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
-
目的のデモ・アプリケーション・ワークスペースをまだ開いていない場合はここで開きます。ほとんどのサンプル・アプリケーション・ワークスペースのファイルは、次のパスに置かれています。
12
/boards/ / / /iar hello_worldデモをサンプルとして使用する場合、パスは以下に置かれています。
1
/boards/evkmimxrt1020/demo_apps/hello_world/iar/hello_world.eww -
ドロップダウン・リストから、目的のビルド・ターゲットを選択します。
ここでは、「hello_world – flexspi_nor_debug」ターゲットを選択します。

-
デモ・アプリケーションをビルドするには、下の図で赤色でハイライト表示されている[Make(作成)]ボタンをクリックします。

サンプル・アプリケーションの実行
アプリケーションをダウンロードして実行するには、以下の手順に従います。
- 開発プラットフォームをUSBケーブルでPCに接続します。
-
PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、デバッグのCOMポートに接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115200(board.hファイルのBOARD_DEBUG_UART_BAUDRATE変数を参照)
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
-
IARで[Download and Debug(ダウンロードとデバッグ)]ボタンをクリックし、アプリケーションをターゲットにダウンロードします。

-
アプリケーションがターゲットにダウンロードされると、自動的にmain()関数まで実行されます。
-
[Go(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが起動します。

-
hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください。
Keil® MDKを使用する
CMSISデバイス・パックのインストール
MDKツールをインストールした後、デバッグ目的でデバイスを完全にサポートするには、CMSIS (Cortex® Microcontroller Software Interface Standard) デバイス・パックをインストールする必要があります。このパックには、メモリ・マップ情報、レジスタ定義、フラッシュ・プログラミング・アルゴリズムなどが含まれています。下記の手順に従って、MIMXRT102xのCMSISパックをインストールしてください。
-
µVisionという名前のMDK IDEを開きます。IDEで、[Pack Installer(パック・インストーラ)]アイコンを選択します。

-
[Pack Installer(パック・インストーラ)]ウィンドウで、[Devices(デバイス)]タブに移動し、[NXP]の下のMIMXRT1021デバイスを選択します。

- [Pack(パック)]タブで、MIMXRT1020-EVKボードのDFPをインストールします。DFPの名前はNXP::MIMXRT1021_DFPです。パックの横にある[Install(インストール)]ボタンをクリックします。このプロセスを正常に完了するには、インターネット接続が必要となります。
-
インストールが完了したら、[Pack Installer(パック・インストーラ)]ウィンドウを閉じて、µVision IDEに戻ります。

サンプル・アプリケーションのビルド
次の手順に従ってhello_worldアプリケーションを開きます。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
-
目的のデモ・アプリケーション・ワークスペースをまだ開いていない場合は以下で開きます。
12
/boards/ / / /mdk ワークスペース・ファイルの名前は、
.uvmpw 1
/boards/evkmimxrt1020/demo_apps/hello_world/mdk/hello_world.uvmpw -
デモ・プロジェクトをビルドするには、[Rebuild(リビルド)]ボタン(赤色でハイライト表示)を選択します。

-
ビルドが正常に完了します。
サンプル・アプリケーションの実行
アプリケーションをダウンロードして実行するには、以下の手順に従います。
-
開発プラットフォームをUSBケーブルでPCに接続します。
-
PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、デバッグのシリアル・ポート番号に接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115200(board.hファイルのBOARD_DEBUG_UART_BAUDRATE変数を参照)
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
-
アプリケーションが正しくビルドされたら、[Load(ロード)]ボタンをクリックして、アプリケーションをターゲットにダウンロードします。

-
アプリケーションをデバッグする場合、[Start/Stop Debug Session(デバッグ・セッションの開始/終了)]ボタン(赤色でハイライト表示)をクリックします。

-
[Run(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが起動します。

-
hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください。

- [Stop(停止)]を押して、デバッグ・セッションを終了します。

Arm® GCCを使用する
ツールチェーンのセットアップ
ここでは、Kinetis SDKでサポートされているように、Arm GCCツールチェーンを使用してKSDKデモ・アプリケーションのビルドと実行を行う際に必要となるコンポーネントをインストールする手順について説明します。Arm GCCツールの使用方法はさまざまですが、今回の例では、Windows環境に焦点を当てています。ここでは省略しますが、GCCツールは、Linux OSやMac OS Xの環境でも利用できます。
GCC Arm Embeddedツールチェーンのインストール
GNU Arm Embeddedツールチェーンからインストーラをダウンロードして、実行します。これは実際のツールチェーンです(コンパイラ、リンカなど)。Kinetis SDKリリース・ノートに記載されている、サポート対象の最新バージョンのGCCツールチェーンを使用する必要があります。
MinGWのインストール
MinGW (Minimalist GNU for Windows) 開発ツールは、サード・パーティ製のCランタイムDLL(Cygwinなど)に依存しないツール・セットを提供します。KSDKで使用されているビルド環境ではMinGWビルド・ツールを利用せず、MinGWとMSYSのベース・インストールを活用しています。MSYSは、Unix系のインターフェースと各種ツールを備えた基本シェルを提供します。
-
MinGW - Minimalist GNU for Windowsファイルから最新のMinGW mingw-get-setupインストーラをダウンロードしてください。
-
インストーラを実行します。インストール・パスとしては「C:\MinGW」を推奨しますが、他のどの場所にでもインストールできます。
-
[Basic Setup(基本セットアップ)]で、「mingw32-base」と「msys-base」が選択されていることを確認します。

-
[Installation(インストール)]メニューで[Apply Changes(変更を適用)]をクリックし、残りの手順に従ってインストールを完了します。

-
Windows OSのPath環境変数に適切なアイテムを追加します。これは、[Control Panel(コントロール・パネル)]>[System and Security(システムとセキュリティ)]>[System(システム)]>[Advanced System Settings(システムの詳細設定)]の[Environment Variables...(環境変数)]セクションで設定します。パスは次のとおりです。
1
\bin デフォルトのインストール・パスであるC:\MinGWを使用した例を以下に示します。パスが正しく設定されていないと、ツールチェーンは機能しません。
PATH変数に「C:\MinGW\msys\x.x\bin」が設定されている場合(KSDK 1.0.0向けの旧仕様)、これを削除してください。削除されていないと、新しいGCCビルド・システムが正しく機能しない場合があります。

-
CMakeからCMake 3.0.xをダウンロードします
-
CMakeをインストールします。インストール時には、必ず[Add CMake to system PATH(CMakeをシステムPATHに追加)]オプションを選択します。すべてのユーザーが使用できるパスにインストールするか、現在のユーザーのみが使用できるパスにインストールするかは、ユーザーが選択します。今回の例では、すべてのユーザーに対してインストールしています。

-
インストーラの残りの手順に従います。
-
PATHの変更を適用するには、システムの再起動が必要になる場合があります。
ArmGCC_DIR向けの新しい環境変数の追加
新しいシステムの環境変数を作成して、「ArmGCC_DIR」という名前を付けます。この変数の値で、Arm GCC Embeddedツールチェーンのインストール・パスを指定します。今回の例では、次のようになります。
1C:\Program Files (x86)\GNU Tools Arm Embedded\4.9 2015q3インストール・フォルダの正確なパス名については、GNU Arm GCC Embeddedツールのインストール・フォルダを参照してください。

CMakeのインストール
サンプル・アプリケーションのビルド
サンプル・アプリケーションをビルドする手順は次のとおりです。
-
GCC Arm Embeddedツールチェーンのコマンド・ウィンドウが開いていない場合はここで開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]>[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します。 -
サンプル・アプリケーションのプロジェクト・ディレクトリに移動します。パスは次のようになります。
12
/boards/ / / /armgcc このガイドの場合、実際のパスは次のようになります。
1
/boards/evkmimxrt1020/demo_apps/hello_world/armgcc 
-
コマンドラインで「build_flexspi_nor_debug.bat」と入力するか、Windows OSのエクスプローラで「build_flexspi_nor_debug.bat」ファイルをダブルクリックして、ビルドを実行します。次のような出力画面が表示されます。

サンプル・アプリケーションの実行
ここでは、J-Link GDBサーバ・アプリケーションを使用してデモ・アプリケーションを実行する手順について説明します。この作業を行うには、次の2つの要件があります。
以下のいずれかであることを確認してください。
-
ボードのOpenSDAインターフェースが、J-Link OpenSDAファームウェアでプログラムされている。ボードがOpenSDAをサポートしていない場合は、スタンドアロンのJ-Linkポッドが必要になります。
ボードのデバッグ・インターフェースにスタンドアロンのJ-Linkポッドが接続されている。一部のハードウェア・プラットフォームでは、外部デバッグ・インターフェースで正常に機能させるためにハードウェアに変更を加える必要があることにご注意ください。
J-Linkインターフェースを設定して接続したら、以下の手順に従ってデモ・アプリケーションをダウンロードして実行します。
-
このボードはJ-Linkデバッグ・プローブをサポートしています。ご使用の前にSEGGERソフトウェアをインストールしてください。SEGGERからダウンロードできます
-
開発プラットフォームをPCに接続します。OpenSDAのUSBコネクタとPCのUSBコネクタをUSBケーブルでつないでください。スタンドアロンのJ-Linkデバッグ・ポッドを使用している場合は、ボードのSWD/JTAGコネクタにも接続してください。
-
PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、デバッグのシリアル・ポート番号に接続します。次の設定値を用いてターミナルを設定します。
-
ボーレート115200(board.hファイルのBOARD_DEBUG_UART_BAUDRATE変数を参照)
パリティなし
8データ・ビット
1ストップ・ビット
-
J-Link GDBサーバ・アプリケーションを開きます。SEGGERインストール・フォルダ(例えば、C:\Program Files (x86)\SEGGER\JLink_V632f)に移動します。デバッグおよびリリースのターゲットについては、ここでコマンド・ウィンドウを開き、「JLinkGDBServer.exe」コマンドを使用します。注:sdram_debugおよびsdram_releaseターゲットの場合は、次のコマンドを使用します。
12
JLinkGDBServer.exescriptfile/boards/evkmimxrt1020/demo_apps/hello_world/ evkmimxrt1020_sdram_init.jlinkscript -
今回の例で選択されているターゲット・デバイスは、MIMXRT1021xxx5Aです。

-
接続すると、画面は次の図のようになります。

-
GCC Arm Embeddedツールチェーンのウィンドウが開いていない場合はここで開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]->[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します。 
-
サンプル・アプリケーションの出力を格納するディレクトリに移動します。出力は、選択したビルド・ターゲットに応じて、次のいずれかのパスに格納されます。
12
/boards/ / / /armgcc/debug 12
/boards/ / / /armgcc/release 今回の例の場合、実際のパスは次のようになります。
1
/boards/evkmimxrt1020/demo_apps/hello_world/armgcc/flexspi_nor_debug -
「arm-none-eabi-gdb.exe
.elf」というコマンドを実行します。この例の場合、「arm-none-eabi-gdb.exe hello_world.elf」というコマンドになります。 
-
次のコマンドを実行します。
「target remote localhost:2331」
「monitor reset」
「monitor halt」
「load」
- アプリケーションがダウンロードされ、リセット・ベクタで停止します。「monitor go」コマンドを実行すると、デモ・アプリケーションが起動します。
hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください。
ブート・オプション
i.MX RTファミリは、さまざまなブート・ソースをサポートし、メモリをオンチップまたは外部のメモリにコピーするオプションのほか、一部のインターフェース向けにExecute in Place (XIP) を備えています。どのような選択肢があり、またご自身の設計に最適なものはどれであるのかをご確認ください。
i.MX RTクロスオーバーMCU向けブート・オプション

| ドキュメントとビデオ | 説明 |
|---|---|
| AN12108 QSPIフラッシュからのブートを可能にする方法 | このドキュメントでは、フラッシュ・ローダを使用してブータブル・イメージをOpen SDAまたはMfgToolを用いて外部ストレージ・デバイスにプログラムする手順を説明しています。 |
| AN12107 オクタルSPIフラッシュおよびSDカードからのブートを可能にする方法 | このドキュメントでは、ブータブル・イメージを外部ストレージ・デバイスにプログラムする方法を説明しています。 |
ツールとリファレンス
MCUXpressoセキュア・プロビジョニング・ツール NXPのi.MX RTでブート可能な実行ファイルを簡単に生成およびプロビジョニングできるようにする、GUIベースのアプリケーション。
ブートに関するコミュニティ・リソース NXPのコミュニティでブートに関する質問を探したり、新しい質問を投稿したりすることができます。
外部メモリ
| ドキュメントとビデオ | 説明 |
|---|---|
| AN12437 i.MX RTシリーズのパフォーマンス最適化 | さまざまなメモリ・デバイスで動作するシステムのパフォーマンスを最適化する方法。 |
| AN12108 QSPIフラッシュからのブートを可能にする方法 | このドキュメントでは、フラッシュ・ローダを使用してブータブル・イメージをOpen SDAまたはMfgToolを用いて外部ストレージ・デバイスにプログラムする手順を説明しています。 |
| AN12107 オクタルSPIフラッシュおよびSDカードからのブートを可能にする方法 | このドキュメントでは、ブータブル・イメージを外部ストレージ・デバイスにプログラムする方法を説明しています。 |
| AN12183 FLEXSPI NORフラッシュのデバッグを可能にする方法 | このアプリケーション・ノートでは、新しいFLEXSPI NORフラッシュをプログラム、デバッグ、および設定する方法について説明しています。 |
| Adesto EcoXipメモリを使用したコードの開発 | NXP i.MX RT1050 EVKBボードとAdesto EcoXiPフラッシュ・デバイスを組み合わせて設定するためのハードウェアおよびソフトウェア要件について説明しています。 |
| AN12564 i.MX RTシリーズでのRead While Write (RWW) の実装 | i.MX RTシリーズにRWWの要件を実装する方法。 |
| AN12239 i.MX RTでHyperRAMを可能にする方法 | i.MX RT MCUでHyperRAMを使用する方法(ハードウェアの接続、HyperRAMプロトコル、ソース・コード、パフォーマンスを含む) 。 |
| AN13028 i.MX RTでのHyperRAM/PSRAMの高度な使用方法 | このアプリケーション・ノートでは、i.MX RT MCUでFlexSPIと組み合わせた場合のHyperRAM/PSRAMの高度な使用方法(FlexSPIプリフェッチ機能、HyperRAM/PSRAMのリフレッシュ間隔、HyperRAMデバイスのサポートなど)について説明しています。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。外部メモリに関するいくつかの一般的なサンプルを以下に挙げます。
FlexSPI NORポーリング・サンプル
ポーリングでのFlexSPIドライバの使用方法。
パス:
1/boards/evkbimrt1020/driver_examples/flexspi/nor/polling_transfer EDMA転送サンプル
EDMAを使用した複数データの転送サンプル。
パス:
1/boards/evkbimrt1020/driver examples/flexspi/nor/edma_transfer SDRAMCサンプル
SEMCコントローラ・ドライバを使用して外部SDRAMチップを初期化する方法。
パス:
1/boards/evkbimrt1020/driver_examples/semc/sdram ツールとリファレンス
MCUXpressoセキュア・プロビジョニング・ツール NXPのi.MX RTでブート可能な実行ファイルを簡単に生成およびプロビジョニングできるようにする、GUIベースのアプリケーション。
セキュリティと整合性
i.MX RT1020はセキュア・バイ・デザインであり、セキュアなシステム・オン・チップ (SoC) を駆動するセキュアなソフトウェアによってサポートされています。
| ドキュメントとビデオ | 説明 |
|---|---|
| i.MX RTセキュア・ブート・ラボ・ガイド | i.MXファミリのセキュア・ブート機能の使用方法について説明しています。これには、キー・ペアと証明書の生成、leftosbツールを使用したヒューズのプログラム、ファームウェアの署名などの方法が含まれます。 |
| i.MX RT10xxクロスオーバーMCUでのセキュア・ブート | セキュア・ブート機能と、MCUXpressoセキュア・プロビジョニング・ツールを使用してそれらを構成する方法について詳しく説明しています。 |
| MCUXpressoセキュア・プロビジョニング・ツールのスタート・ガイド | この一連のビデオでは、ツールの基本的な説明に加え、i.MX RT1060評価キットで利用できるさまざまなプロビジョニングの種類とブート・デバイスを紹介するツールのライブ・デモを視聴できます。 |
| セキュア・ブートのウェビナーとデモ | 最新のNXPソフトウェアとツールを使用して、i.MX RT10xx MCUをベースとした設計にブート認証と暗号化機能を統合できます。セキュア・ブート機能と、MCUXpressoセキュア・プロビジョニング・ツールを使用してそれらを構成する方法について詳しく説明しています。 |
| 今日のセキュリティ要件を満たす:クロスオーバー・プロセッサでエンド・ツー・エンドのセキュリティを実現 | IoTのエンド・ノードとエッジ・ノードが満たすべき共通のセキュリティ目標と、エンド・デバイスで信頼の基点を実現するために必要な手順やツールについて説明します。 |
| AN12800 セキュリティのためのi.MX RT10xxのヒューズ・プロビジョニング | セキュアなアプリケーションには、セキュリティ機能に関連しないヒューズもあり、設定が必要な場合があります。このドキュメントでは、セキュアなアプリケーションのためのヒューズのプロビジョニングについて説明し、ヒューズの設定に関する推奨事項を提供します。 |
| AN12419 i.MX RT10xx用セキュアJTAG | このドキュメントでは、i.MX RT10xx MCUファミリのセキュアJTAGの使用方法について説明します。 |
| AN12901 DCP – キー管理の方法 | i.MX RT10xxは、AES (Advanced Encryption Standard) 暗号化とハッシュ機能をサポートするデータ・コプロセッサ (DCP) ブロックを備えています。このアプリケーション・ノートでは、さまざまなキーでAESブロックを使用する方法と、キーを管理する方法について説明します。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。セキュリティと整合性に関するいくつかの一般的なサンプルを以下に挙げます。
DCPサンプル
KSDKソフトウェアを使用し、DCPソフトウェア・ドライバでいくつかの暗号化アルゴリズムを実装するデモ・プログラム。
パス:
1/boards/evkbimrt1020/driver_examples/dcp BEEサンプル
QSPIメモリ領域に格納されたデータのオンザフライ復号化のためにBEEドライバを設定する方法を示します。
パス:
1/boards/evkbimrt1020/driver_examples/bee Mbedtlsサンプル
プログラムは、暗号化アルゴリズムのベンチマークとテストを実行します。(オプションのmbedTLSミドルウェア・パッケージが必要です)
パス:
1/boards/evkbimrt1020/mbedtls_examples/ ツールとリファレンス
ワンストップ・セキュア・ブート・ツール: NXP-MCUBootUtility NXP MCUセキュア・ブート用に特別に設計されたGUIツール。NXPの公式セキュリティ・イネーブルメント・ツールセットのすべての機能が含まれており、グラフィカル・ユーザー・インターフェースの完全な動作をサポートします。
MCUXpressoセキュア・プロビジョニング・ツール NXPのi.MX RTでブート可能な実行ファイルを簡単に生成およびプロビジョニングできるようにする、GUIベースのアプリケーション。
有線通信
| ドキュメントとビデオ | 説明 |
|---|---|
| NXPマイクロコントローラ用の有線通信ミドルウェア | MCUXpresso SDKで提供される有線通信ライブラリとサンプルについて説明しています。 |
| NXPのMCUXpresso SDKのCANopen | NXP MCUXpresso SDKに含まれるEmSA CANopenライブラリの使用方法。 |
| i.MX RT1064とLPC55を使用したCANopenおよび組込みウィザードのデモ | i.MX RT1064とLPC55S16デモ・ボードを使用した、NXP MCUXpresso SDKのさまざまなミドルウェア・コンポーネントを組み合わせたデモ。 |
| AN12822 RT1050におけるFlexIOによる8080バスのエミュレート | FlexIOモジュールを使用して、8080パラレル・バスのエミュレートや8080バス・インターフェースでのグラフィックTFT LCDの駆動を行う方法。 |
| AN12679 NXPのSDKをベースにしたi.MX RTへの高速RS-485アプリケーションの実装 | NXP i.MX RTシリーズEVKにRS-485通信を実装する方法、およびNXP MCUXpresso SDKベースのソフトウェアを設計する方法。 |
| MCU Tech Minutes | CANopenとMCUXpressoのスタート・ガイド | EmSAのCANopenスタックを含むSDKをダウンロードして、1つのマネージャと1つのデバイスのCANopenネットワークをセットアップする方法について説明しています。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。有線通信に関するいくつかの一般的なサンプルを以下に挙げます。
CANopenサンプル
最小限のCANopenマネージャとCiA 401汎用I/Oデバイスを実装します。(オプションのCANopenミドルウェア・パッケージが必要です)
パス:
1/boards/evkbimrt1020/canopen_examples/ Lwipサンプル
ICMPプロトコルを使用するlwIP TCP/IPスタックのさまざまなデモとサンプル。(オプションのlwIPミドルウェア・パッケージが必要です)
パス:
1/boards/evkbimrt1020/lwip_examples/ USBサンプル
SDKには、ホストおよびデバイスの操作に関するUSBサンプルが複数含まれています。(オプションのUSBホスト、デバイス、OTGスタック・ミドルウェア・パッケージが必要です)
パス:
1/boards/evkbimrt1020/usb_examples/ AWSイーサネット・サンプル
Amazon FreeRTOS認定 (AFQ)、デバイス設定、AWS Greengrass discovery、Androidモバイル・アプリケーションによるリモート・コントロール、shadow lightbulbのデモ。
パス:
1/boards/evkbimrt1020/aws_examples ツールとリファレンス
CANopenおよびCANopen FDを使用した堅牢なネットワーク通信の開発を加速 NXPはEmSAと連携し、CANopenをイネーブリング・ソフトウェア・テクノロジとして提供しています。MCUXpresso SDKでは、MicroCANopen Plus v7.0をベースに完全に統合されたCANopenライブラリが提供されています。
ワイヤレス・コネクティビティ
ワイヤレス・コネクティビティ
| ドキュメントとビデオ | 説明 |
|---|---|
| NXPマイクロコントローラのクラウド・コネクティビティ | Amazon Web Services、Microsoft Azure、Google Cloud IoTなどのクラウド・サービスの統合サポート。 |
| AN12257 LoRaを使用したIoTデバイスのセキュアな接続 | このドキュメントでは、ゲートウェイとエンド・デバイス間でLoRaを使用してIoTのセキュアな接続を確立する方法について説明しています。 |
| NXPおよびPanasonicのi.MX RTおよびWi-Fiソリューション | i.MX RTクロスオーバーMCUと、デュアルバンドPAN9026 Wi-Fi 4 + Bluetooth™ 5.0無線モジュールを含む対応Wi-Fi®モジュールをご覧ください。 |
パワーマネジメント
パワー・マネジメントには、デバイス固有の技術と、電源管理および低消費電力性能の最適化に関する情報が含まれます。
| ドキュメントとビデオ | 説明 |
|---|---|
| AN12085 i.MX RT低消費電力機能の使用方法 | i.MX RTシリーズでの低消費電力アプリケーション設計に関するポイントを説明します。 |
| AN12204 i.MX RT1020の消費電力と測定 | このドキュメントでは、ラン・モードと低消費電力モードの構成を含むi.MX RT1050の消費電力と、異なる電力モードでの消費電力について説明します。 |
オーディオ
| ドキュメントとビデオ | 説明 |
|---|---|
| NXPマイクロコントローラのオーディオ・ソフトウェア | ミドルウェア、サンプル・アプリケーション、MCUXpresso Config Tools、パートナーによる高度なオーディオ・アプリケーション向けソリューション。 |
| AN12090 SAIのマルチチャネル機能の使用 | このドキュメントでは、7.1サラウンド・サウンド・システムのテクノロジ(SAIおよびFLACを含む)を紹介し、マルチチャネルSAI機能を使用して正確かつパフォーマンスに優れた方法で動作するアプリケーションを開発する方法について説明しています。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。モータ制御に関するいくつかの一般的なサンプルを以下に挙げます。
SAIのデモ
複雑なデジタル・オーディオの再生と録音の事例を紹介するデモです。
パス:
1/boards/evkbimxrt1020/demo_apps/sai SAI周辺機器のデモ
複雑なデジタル・オーディオの再生と録音の事例を紹介するデモです。
パス:
1/boards/evkbimxrt1020/demo_apps/sai_peripheral SAIドライバのサンプル
EDMA、割込み、録音、再生機能でSAIドライバを使用する方法。
パス:
1/boards/evkbimxrt1020/driver_examples/sai I2Sデモ
EDMAと割込みでflexio_i2sドライバを使用する方法。
パス:
1/boards/evkbimxrt1020/driver_examples/flexio/i2s USBオーディオのサンプル
ベア・メタルとFreeRTOS向けのオーディオ録音と再生のサンプル。
パス:
1/boards/evkbimxrt1020/usb_examples 音声
| ドキュメントとビデオ | 説明 |
|---|---|
| 音声処理 | 無料の音声認識テクノロジを含む、NXPのさまざまな音声制御およびコミュニケーション用ソフトウェアとソリューション。 |
| AN13065 TensorFlow Liteインターフェースでの性別音声認識 | このドキュメントでは、TensorFlowモデルで性別音声オーディオのサンプルと分類のトレーニングを行う手順について説明します。 |
| AN12975 AzureWave AW-NM372SM WiFi/BT向けMCU Alexa音声ソリューション・サポート | AzureWave AW-NM372SM IEEE802.11b/g/n W-LANおよびBluetoothモジュールをサポートするようにSLN-ALEXA-IOTハードウェアおよびソフトウェアを変更する方法。 |
ツールとリファレンス
NXP EdgeReady MCUベースのAlexa音声サービス このソリューションは、i.MX RTクロスオーバーMCUを活用しており、開発者は迅速かつ簡単にAlexa音声アシスタント機能を自社製品に追加することが可能です。
モータ制御
モータ制御は、複雑かつ高度な技術です。モータの数、モータのタイプ、モータ・ドライバがセンサ付きかセンサレスかに応じて複雑さが大きく異なり、困難な問題に陥りがちです。
NXPはすぐに使用できるモータ制御アルゴリズム(ミドルウェア)を数多く提供していますが、最初はMCUXpresso SDKに含まれているFreeMasterのサンプルを使用することをお勧めします。これらのサンプルでは、組込みソフトウェア・アプリケーションの実行時の設定および調整を可能にするユーザー・フレンドリーなリアルタイム・デバッグ・モニタおよびデータ可視化ツール、FreeMASTERランタイム・デバッグ・ツールを活用しています。
FreeMASTERは、実行中のシステムでの変数の非割込み型監視をサポートするとともに、オシロスコープに似たディスプレイに複数の変数を標準のウィジェット(ゲージやスライダーなど)またはテキスト形式のデータとして表示可能で、シンプルに使えるデータ・レコーダを実現できます。また、HTML、MATLAB®、Excelや他のスクリプト可能なフレームワーク、さらにはNode-REDのような人気の高いビジュアル・プログラミング・ツールともリンクできます。
| ドキュメントとビデオ | 説明 |
|---|---|
| i.MX RTでモータを回転させる | このプレゼンテーションでは、BLDCモータ、PMSMモータ、ACIMモータを回転させるためのMCUの要件、モータ制御の基本およびフレームワーク、i.MX RTでのモータ制御の実装方法をご紹介します。 |
| AN12214 MIMXRT10xx EVKでのPMSMフィールド指向制御 | 三相永久磁石同期モータ (PMSM) 向けの、センサ使用またはセンサレスの速度/位置モータ制御ソフトウェアの実装について説明しています。 |
| MIMXRT10xx EVKでのPMSMフィールド指向制御のユーザー・ガイド | ほとんどの一般的なIDEにおける永久磁石同期モータ (PMSM) プロジェクトのオープン、コンパイル、デバッグ、実行の方法と、NXPのFreedom PMSMパワー・ステージおよびi.MX RT10xx評価キットを完全なモータ制御リファレンス・デザインに変える方法をステップ・バイ・ステップで紹介するガイドです。 |
| AN12659 NXPクワッド・モータ制御開発プラットフォームHWの概要 | NXPのクワッド・モータ制御開発プラットフォームのモジュール型アーキテクチャについて説明し、さまざまなコンポーネントのハードウェアを詳しく紹介しています。 |
| AN12200 i.MX RTにおけるデュアルFOCサーボ・モータ制御 | NXPのi.MX RT1020プロセッサを使用したデュアル・サーボのデモについて説明しています。他のi.MX RT製品をベースにしたモータ制御アプリケーションを開発するためのリファレンスとして活用できます。 |
| FreeMASTERのハウツー | FreeMASTERツールを使用するエンジニアのためのスタート・ガイド。 |
| FreeMASTER 3.0インストール・ガイド | この記事では、FreeMASTER 3.0のインストール手順について説明しています。 |
| 4部構成のFreeMASTERウェビナー・シリーズ | オンデマンド・トレーニングでは、FreeMASTERソフトウェアの概要、特長、機能、利用可能なサンプル、アプリケーションのユース・ケースのほか、簡単に始めるための方法について説明します。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。モータ制御に関するいくつかの一般的なサンプルを以下に挙げます。
ACIM
ACインダクション・モータのミドルウェア。
パス:
1/middleware/acim BLDC
ブラシレスDCモータのミドルウェア。
パス:
1/middleware/bldc Freemaster
モータ制御向けFreemasterミドルウェアのサンプル。
パス:
1/middleware/freemaster PMSM
永久磁石同期モータのミドルウェア。
パス:
1/middleware/pmsm ツールとリファレンス
RTCESLライブラリ 基本的な数値演算から高度な変換やオブザーバまで網羅したアルゴリズム・セットで、複雑なリアルタイム制御アプリケーションに容易に組み込むことができます。また、NXPのモータ制御リファレンス・デザインでも使用されています。
AMCLIBユーザー・ガイド 高度なモータ制御ライブラリ (AMCLIB) およびArm Cortex M7Fコア・ベースのマイクロコントローラ・ファミリ向けに最適化された機能について説明しています。
クワッド・モータ制御開発プラットフォーム 1つのi.MX RT1050クロスオーバーMCUで最大4つの異なるモータを制御しながら、有線またはワイヤレスのコネクティビティとHMIインターフェースを管理する方法を示しています。
Tera Termチュートリアル
Tera Termチュートリアル
Tera Termは、広く利用されているオープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- SourceForgeからTera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- Tera Termを起動します。初めて起動する際には、次のダイアログが表示されます。シリアル・オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます。
- 事前に確認したCOMポート番号を使用して、シリアル・ポートをボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]>[Serial Port(シリアル・ポート)]から行うことができます。
- 接続が確立されているか検証します。確立されている場合、Tera Termのタイトル・バーに次のように表示されます。
- 以上で設定は完了です


PuTTYチュートリアル
PuTTYチュートリアル
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- 下のボタンをクリックしてPuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- 選択したダウンロードのタイプに応じて、ダウンロードした*.exeファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します。
- 表示されたウィンドウで設定を行い、[Serial(シリアル)]ラジオ・ボタンを選択して、事前に確認したCOMポート番号を入力します。ボーレートもあわせて指定します。今回は「115200」を入力します。
- [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しいCOMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます。
- 以上で設定は完了です

サポート
トレーニング
次の段階に進むために、以下で適切な課題を見つけましょう。不明な点がある場合は、NXPサポートにお問い合わせください。
| トレーニング | 説明 |
|---|---|
| MCUXpresso IDEとMCUXpresso Config Toolsを使用した基本的なアプリケーション開発 | この3部構成のビデオ・シリーズでは、インポートされたSDKサンプル・プロジェクトを使用する際や新規プロジェクトを作成する際における、MCUXpresso IDEとConfig Tools間の基本的なインタラクションについて取り上げています。 |
| MCU Tech Minute - i.MX RTシリーズの主な機能と利点 | i.MX RTシリーズの主な機能と利点のいくつかをショート・ビデオで紹介しています。 |
| i.MX RT10xxトレーニング | この製品に関するNXPのオンデマンド・トレーニング、ハウツー・ビデオ、およびウェビナーの全リスト。 |
フォーラム
NXPのいずれかのコミュニティ・サイトで、他のエンジニアとつながり、i.MX RT10xxを使用した設計に関する専門的なアドバイスを受けることができます。
製品フォーラム:
ソフトウェア・フォーラム:
センサ
豊富な品揃えのNXPセンサ・ソリューションで、世界に目を向けましょう。NXPなら、加速度センサ、圧力センサ、タッチ・センサなど、プロジェクトに適したセンサ・ソリューションを見つけることができます。詳細については、センサをご覧ください
NFC
NFC (Near Field Communication) は、簡単なタッチだけで周りの世界とセキュアにやり取りできるシンプルで直感的なテクノロジです。NXPのNFCソリューションの詳細については、NFCをご覧ください
i.MXおよびMCUXpressoコミュニティ
他のエンジニアとつながり、i.MXプロセッサとMCUXpressoのソフトウェアやツールを使用した設計に関して専門的なアドバイスを受けることができます。i.MXコミュニティ、MCUXpressoソフトウェアおよびツール・コミュニティという2つの専門コミュニティのいずれかで、コミュニティ・ディスカッションにご参加ください