i.MX RT600評価キットのスタート・ガイド
このドキュメントの内容
-
接続
-
ソフトウェアの入手
-
ビルドと実行
-
SDKサンプルの変更
-
詳細情報
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

お客様の i.MX RT600 Evaluation Kit

2. ソフトウェアの入手
2.2 MCUXpresso SDKですぐに設計を開始する
MCUXpressoソフトウェア開発キット (SDK) は無償で利用することができ、オープンソースのライセンスに基づいて、すべてのハードウェア抽象化およびペリフェラル・ドライバ・ソフトウェアのすべてのソース・コードが提供されます。
下のボタンをクリックして、MIMXRT685-EVK用に事前設定済みのSDKリリースをダウンロードしてください。
スペースが含まれていないディレクトリ・パスにSDKを解凍します。

オンラインのSDK Builderにアクセスし、提供されているSDKビルダを使用してMIMXRT685-EVK用のカスタムSDKパッケージを作成することもできます。
2.3 ツールチェーンをインストールする
NXPは、MCUXpresso IDEというツールチェーンを無償で提供しています。

別のツールチェーンを使用したい場合は?
問題ありません。MCUXpresso SDKは、IAR、 Keil、コマンドラインGCCなどの他のツールをサポートしています。

2.4 MCUXpresso Config Tools
MCUXpresso Config Toolsは、ユーザーがMCUXpresso SDKプロジェクトを新規に作成するための構成ツールの統合スイートであり、カスタム・ボード・サポート用の初期化Cコードを生成するためのピンとクロックのツールも備えています。MCUXpressoIDEの一部としてすでに完全に統合されていますが、異なるツールを使用している場合は、別のツールとしてダウンロードすることもできます。

2.5 LPCScrypt
デバッガと仮想COM ポート用のドライバもインストールする必要があります。これらはLPCScryptパッケージの一部であり、以下からダウンロードできます。J-Linkのインターフェースを使用するには、LPC-Link2の回路のファームウェアもアップデートする必要があります。これについては、以下のチュートリアルで説明しています。
LPCScryptチュートリアル
LPCScryptは、LPCマイクロコントローラ用のコマンドライン・ベースの高速フラッシュ、EEPROM、OTP、セキュリティのプログラミング・ツールです。最新のCMSIS-DAPおよびJ-Linkファームウェアのプログラム用として推奨されるツールです。
- 下のボタンを使用してLPCScryptツールをダウンロードし、プラットフォームをWindows、MAC OC X、Linuxの中から選択します。ダウンロードしたら、インストーラを実行します。インストール時には、すべてのプラットフォームでDFUドライバとVCOMドライバが自動的にインストールされます。
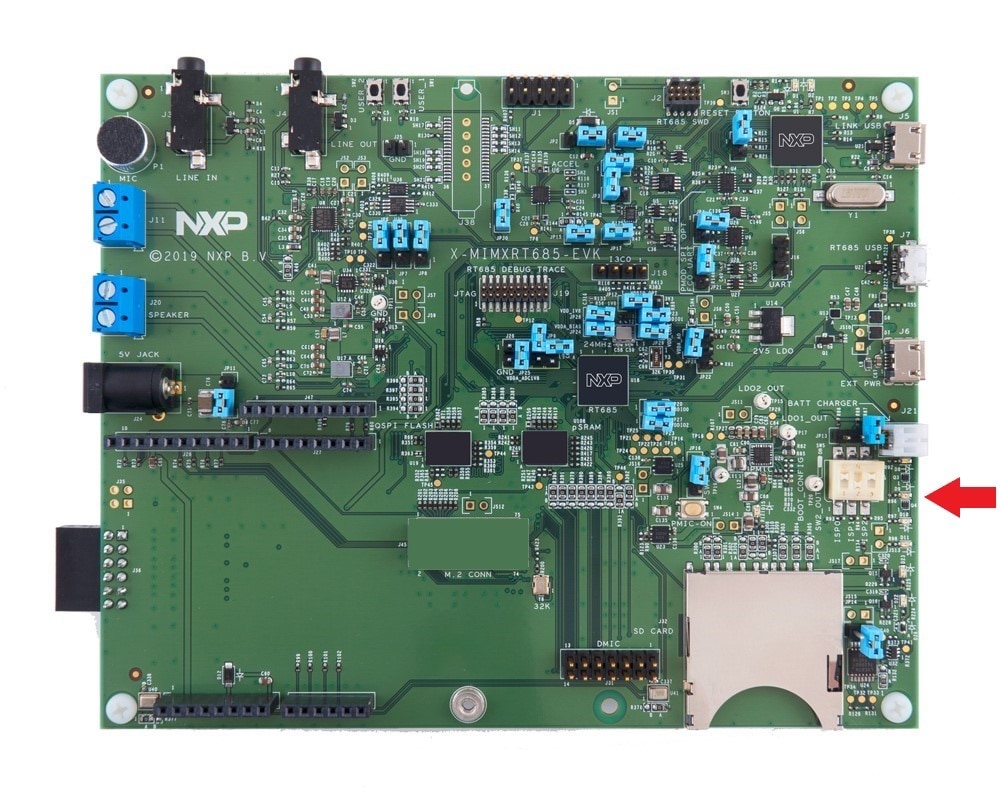
- LPC-Link2のデバッグ回路ファームウェアをアップデートするには、
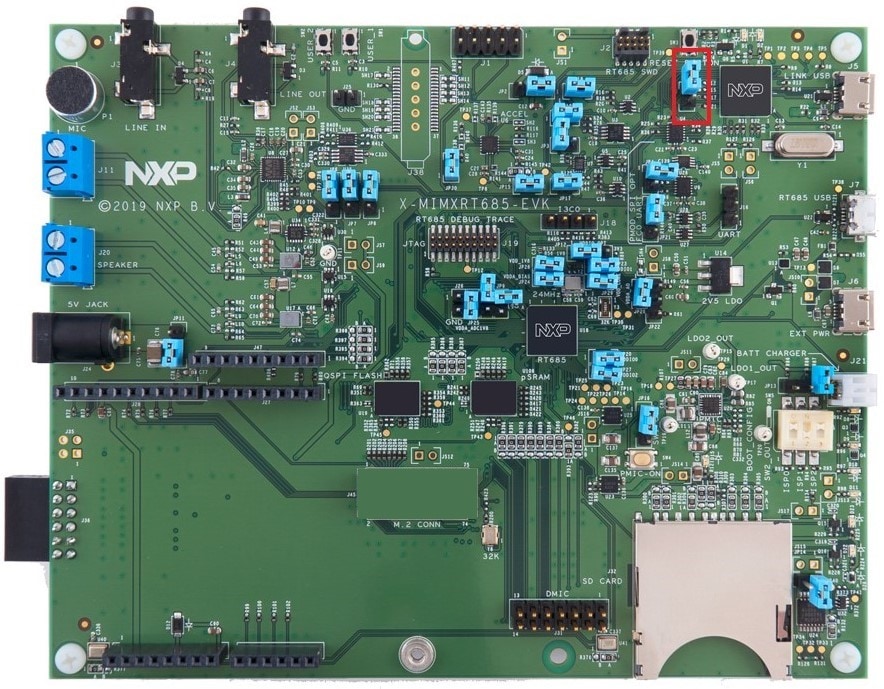
J5のUSBケーブルを抜いて、DFULinkジャンパを接続します。- MIMXRT685-EVKでは、
JP1がLPCXpresso DFUジャンパです。ジャンパを使用してJP1を接続します。
- MIMXRT685-EVKでは、
- デバッグ・リンクのUSBコネクタJ5を使って、ボードをホスト・コンピュータに再接続します
- LPCScryptをインストールしたC:\ProgramData\Microsoft\Windows\Start Menu\Programs\LPCScryptにある「Boot LPCScrypt」ファイルをダブルクリックして、LPCScryptを起動します。
- コマンド・シェル内のprogram JLINKスクリプトを実行して、JLinkデバッグ・ファームウェアをインストールします。

- ファームウェアを選択すると(今回はJ-Link)、LPCScryptのコンソールに以下のように表示されることを確認します。
- プログラミングが完了したら、ボードをホストから外します。これで準備完了です。DFULinkジャンパを取り外し、ボードをホスト・コンピュータに再接続します。ホストのUSBシステム上にプローブのリストが表示されます。



2.6 シリアル・ターミナル
多くのMCUXpresso SDKサンプル・アプリケーションでは、MCU UART経由でデータを出力します。任意のターミナル・ソフトウェアをインストールし、115200のボーレート、8データ・ビット、パリティなし、1ストップ・ビットに設定します。MIMXRT685-EVKの仮想COMポートのポート番号を確認するには、デバイス・マネージャを開き、[Ports(ポート)]の下にあるグループを探します。
ターミナル・アプリケーションの使用方法がわからない場合は、MCUXpresso IDEターミナル・チュートリアル、Tera Termチュートリアル、PuTTYチュートリアルのいずれかのチュートリアルをお試しください。
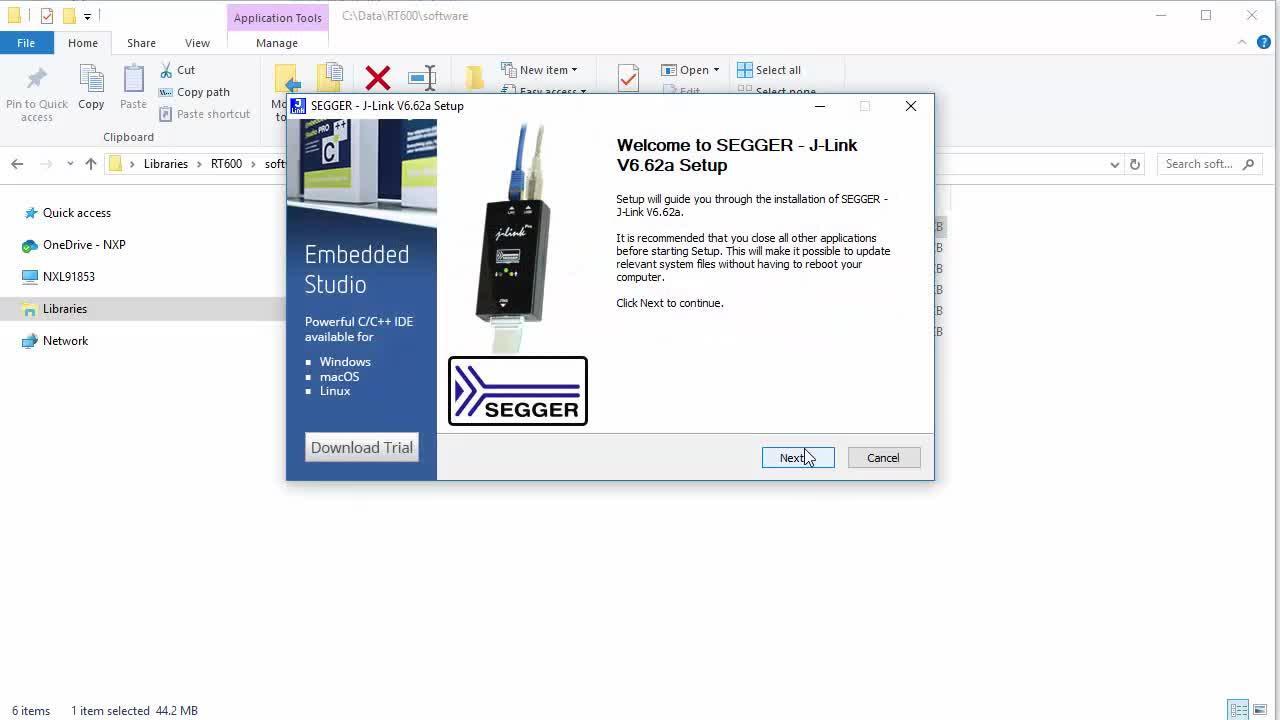
2.7 J-Link
HiFi4 DSPをデバッグするには、必須のJ-Linkドライバをダウンロードする必要があります。このソフトウェアをダウンロードしてインストールする方法については、次のチュートリアルに従ってください。

SEGGER J-Linkチュートリアル
- J-Linkソフトウェアをダウンロードします
- 「J-Linkソフトウェアとドキュメントパック」セクションを展開します
- お使いのOSに対応するソフトウェアを選択し 、最新バージョンをダウンロードします
- ダウンロードした.exeファイルをダブルクリックして実行します。J-Linkのインストールが完了するまで指示に従って操作します
- 以上で設定は完了です
SEGGERダウンロード・ページにアクセスしてください。
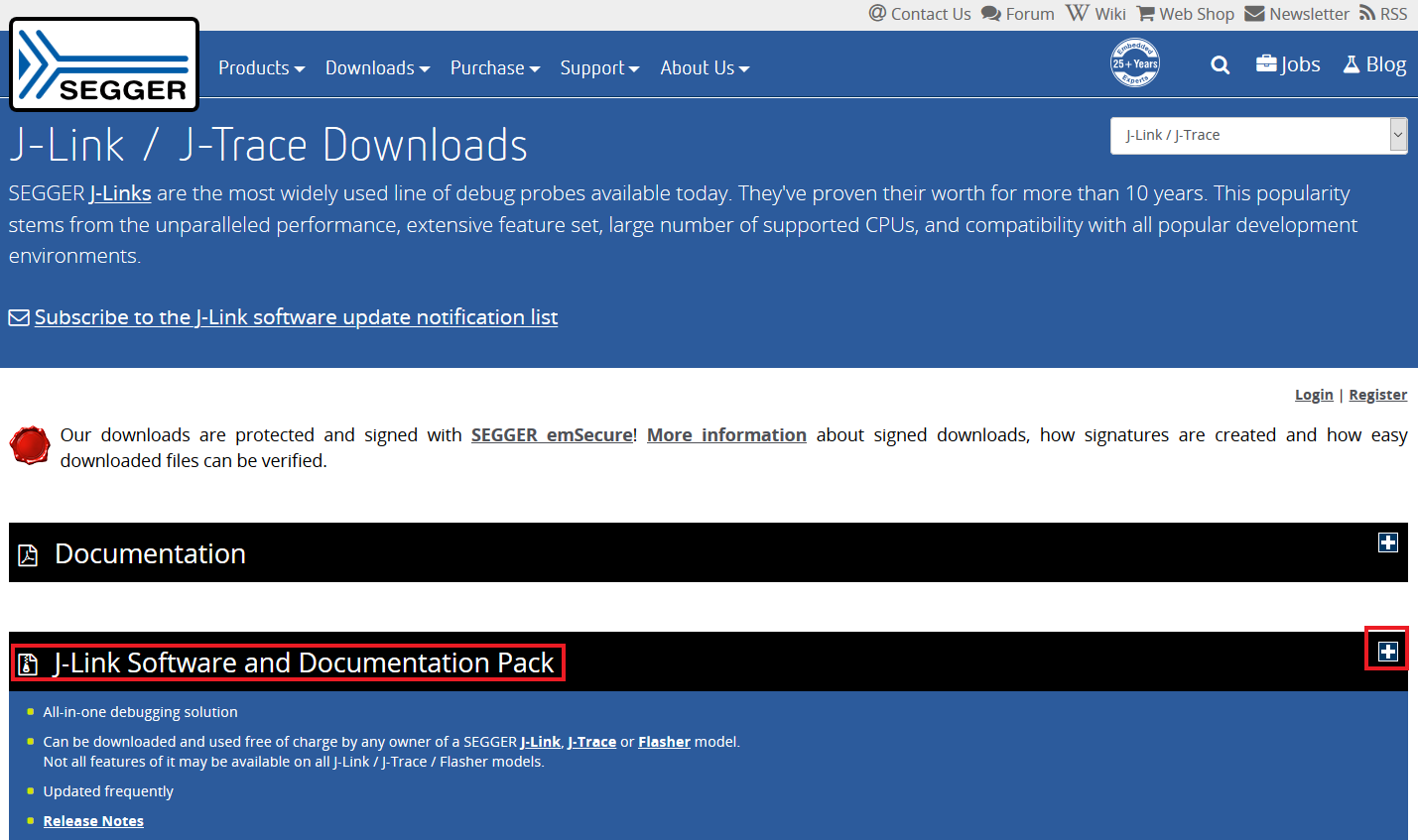

利用規約に同意して、ソフトウェアをダウンロードします
2.8 Xtensa Xplorer IDEおよびツールのインストール
MIMXRT685-EVKでDSPのコーディングおよびデバッグを行うには、Cadence Tensilica Xplorerをダウンロードする必要があります。これはMIMXRT600のDSPコアで利用可能な唯一の開発IDEです。
Tera Termチュートリアル
Cadence® Tensilica® Xplorerは、ユーザーによる高性能Tensilica® プロセッサ用のアプリケーション・コードの作成を支援する包括的な開発環境です。Xplorerは、XCCコンパイラ、アセンブラ、リンカ、デバッガ、コード・プロファイラ、およびフルセットのGUIツールなどのパワフルなソフトウェア開発ツールへのインターフェースです。
Xplorer(GUIとコマンド・ライン環境の両方を含む)はMIMXRT600のDSPコアで利用可能な唯一の開発用IDEです。
- プロファイルを作成します。これはTensilica Toolsをダウンロードするために必要となります。ダウンロード・ページにアクセスして 、ログインしてください 。初めてアクセスする場合は、最初に登録してください
- 登録が完了したら、Xtensa Xplorer IDEをインストールして、ログインしてください。利用可能なツールが表示されます。複数のバージョンが提供されている場合には、最新バージョンを使用することを推奨します。手順は、名称がわずかに異なることを除いて、すべてのバージョンで同じです
- お使いのOS向けの「Xtensa Xplorer IDE」をダウンロードしてインストールしてください。
- お使いのOS向けの「DSP構成」をダウンロードします。必ずNEWLIBバージョンを選択してください。このファイルは後に使用します。
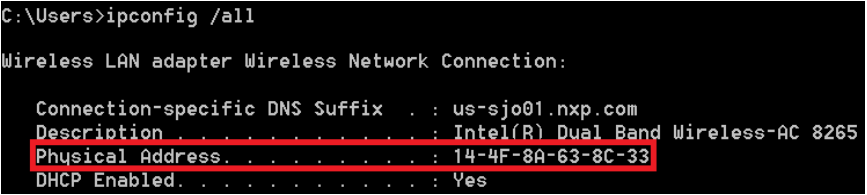
- 正しいライセンス・ファイルを生成するためのライセンス・キーをダウンロードするには、まず、Xtensaツールを実行するコンピュータの正確なMACアドレスを調べる必要があります。コマンド・プロンプトを開き、次のように入力します。
Windows: - ライセンスが生成およびダウンロードされたら、ライセンス・キーをインストールします。Xplorer IDEを開き、メニューから[Help(ヘルプ)]>[Xplorer License Keys(Xplorerライセンス・キー)]>[License Options(ライセンス・オプション)]>[Install Software Keys(ソフトウェア・キーのインストール)]の順に選択します。ライセンス・キーのファイルを選択し、[Finish(完了)]をクリックします。
- RT600 DSPのビルド構成をインストールします。ビルドの構成は、デフォルトで画面の左下隅にある[System Overview(システムの概要)]パネルを使用してIDEにインストールできます。このパネルが表示されない場合は、メニュー項目から[Window(ウィンドウ)]>[Show View(ビューの表示)]>[System Overview(システムの概要)]を使用して表示を切り替えることができます。
- Xtensa On Chip Debuggerデーモンをインストールします。Xtensa On Chip Debugger (xt-ocd) は、gdb ベースのパワフルなデバッグ・ツールです。Xplorer IDEには、デフォルトではインストールされていません。自己解凍型実行ファイル・インストーラがIDEに含まれています。これは次の場所にあります。
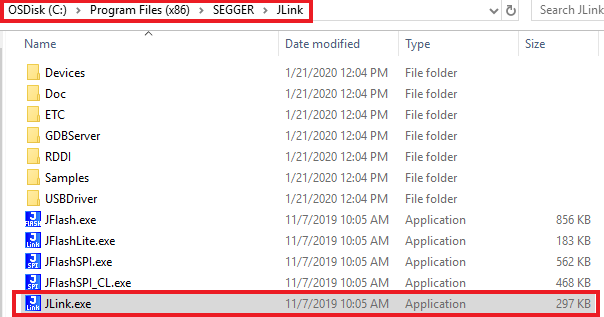
LPC-Link2のJlinkシリアル番号を確認します。JLINK commanderを実行して、シリアル番号を確認してください。これは次の場所にあります。
1
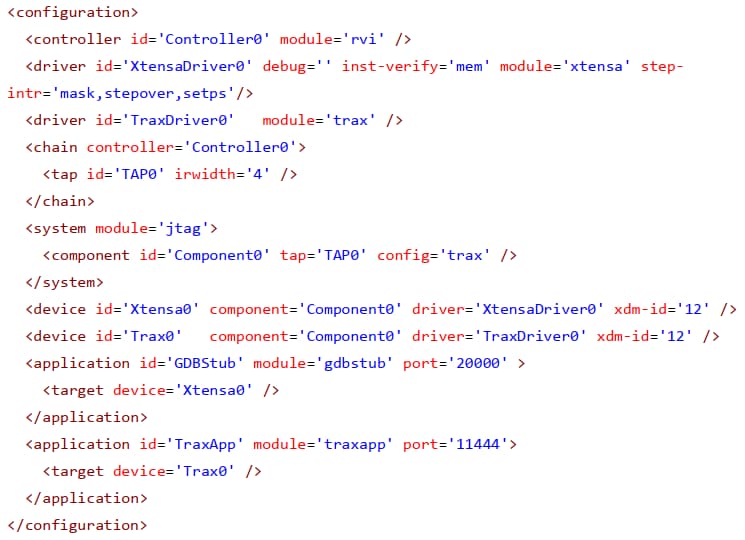
“C:\Program Files (x86)\SEGGER\JLink”- トポロジ・ファイルを編集します。xt-ocdは「topology.xml」という名前のXML入力ファイルで構成されます。このファイルは、Xtensa OCDがインストールされた次のディレクトリにあります。
1
C:\Program Files (x86)\Tensilica\Xtensa OCD Daemon 14.01 - このファイルをデバッガ・ハードウェア用に変更する必要があります。例に示したJ-linkを使用する場合、このtopology.xmlファイルで元のファイルを置き換えてください。または、以下の例のいずれかをコピーします。

「Tensilica tools」からアクティベーション・リンクを記載した確認メールが届きます。アクティベーション・リンクをクリックして登録を完了させます。

 Linux:
Linux: 
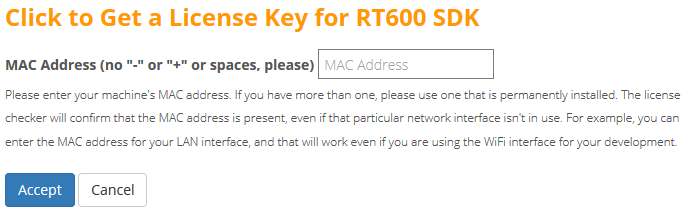
再読み込みしてTensilicaのダウンロード・ページに戻り 、[Get a License Key for RT600 SDK(RT600 SDKのライセンス・キーを取得する)]をクリックします。

「-」や 「:」の記号を省いたMACアドレスを入力します。


ステップ2でダウンロードした構成を検索します。

Windows:
1 C:\usr\xtensa\XtDevTools\downloads\RI2019.1\tools\xt-ocd-14.0.1-windows64-installer.exe Linux:
1 ~/xtensa/XtDevTools/downloads/RI2019.1/tools/xt-ocd-14.0.1-linux64-installer 現時点では、xt-ocdはRT600向けのJ-LinkプローブおよびSWD (Serial Wire Debug) でのArm RVI/DSTREAMプローブをサポートしています。Xt-ocdによってJ-Linkプローブのサポートはインストールされますが、必須のJ-Linkドライバはインストールされません。それらは個別にインストールする必要があります。RT600ではJ-Linkソフトウェア・バージョン6.46以降が必要です。
“ln -s
すべてのEVK/LPC-Link2でJlink S/Nが異なります。
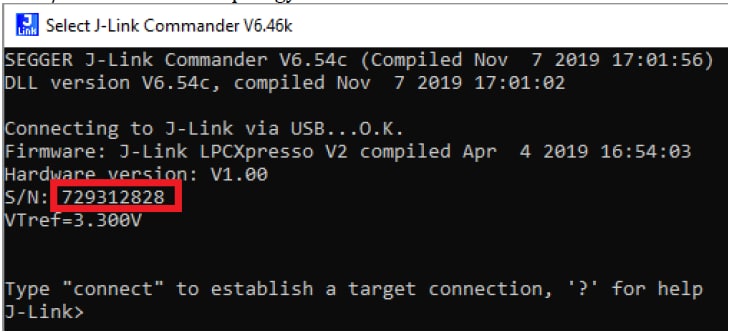
「usbser」セクションを独自のJlinkシリアル番号(前のステップで取得した9桁の番号)に置き換える必要があることに注意してください。

Arm RealView ICE (RVI) とDSTREAMデバッグ・プローブを使用する場合の別のtopology.xmlの例を以下に示します。
3. ビルドと実行
3.2 MCUXpresso SDKサンプル・コードを確認する
MCUXpresso SDKには、サンプル・アプリケーション・コードが豊富に用意されています。利用可能なコードを確認するには、SDKのインストールの「SDKボード」フォルダに移動し、「MIMXRT685-EVK」を選択します。
1 /boards/evkmimxrt685. 特定のサンプル・コードの詳細については、サンプルのディレクトリにあるreadme.txtファイルを開いてください。
3.3 MCUXpresso SDKサンプルのビルドとデバッグ
興味のあるデモ・アプリケーションやドライバのサンプルがいくつかあれば、デモを自分でビルドおよびデバッグする方法を学ぶことができます。SDKのスタート・ガイドでは、SDKでサポートされているすべてのツールチェーンのデモを設定、ビルド、およびデバッグする方法について、わかりやすく手順に沿って解説しています。
以下のガイドを参照し、MCUXpresso IDEを使用してサンプル・アプリケーションを開いてビルドやデバッグを行う方法を習得してください。
MCUXpresso IDEを使用する
RT600 SDKには、DSPのサンプル・アプリケーションが豊富に用意されています。各DSPサンプルに、Arm CM33用とDSP HiFi4用の2つのソース・ディレクトリが含まれます。
DSPデモをデバッグするには、次の2つの手順に従う必要があります。1つ目は、MIMXRT685-EVKにCM33アプリケーションのビルドと書き込みを行うことです。2つ目は、Xtensa Xplorer IDEを使用してDSPアプリケーションのビルドとデバッグを行うことです。
Cortex-M33アプリケーションのビルドとフラッシュ
次の手順では、Cortex-M33向けにMCUXpresso IDEを使用したmu_pollingアプリケーションについて説明します。MCUXpresso IDEのインストールについては、このスタート・ガイドのセクション「2. ソフトウェアの入手」に記載されています。
- MCUXpresso IDEを開きます。
- MCUXpresso IDEウィンドウ内のビューを[Installed SDKs(インストール済みSDK)]に切り替えます。
- MIMXRT685-EVK SDKのzipファイルを[Installed SDKs(インストール済みSDK)]ビューにドラッグ&ドロップします。
- 次のポップアップが表示されます。[OK]をクリックして以下のインポートを続行します。
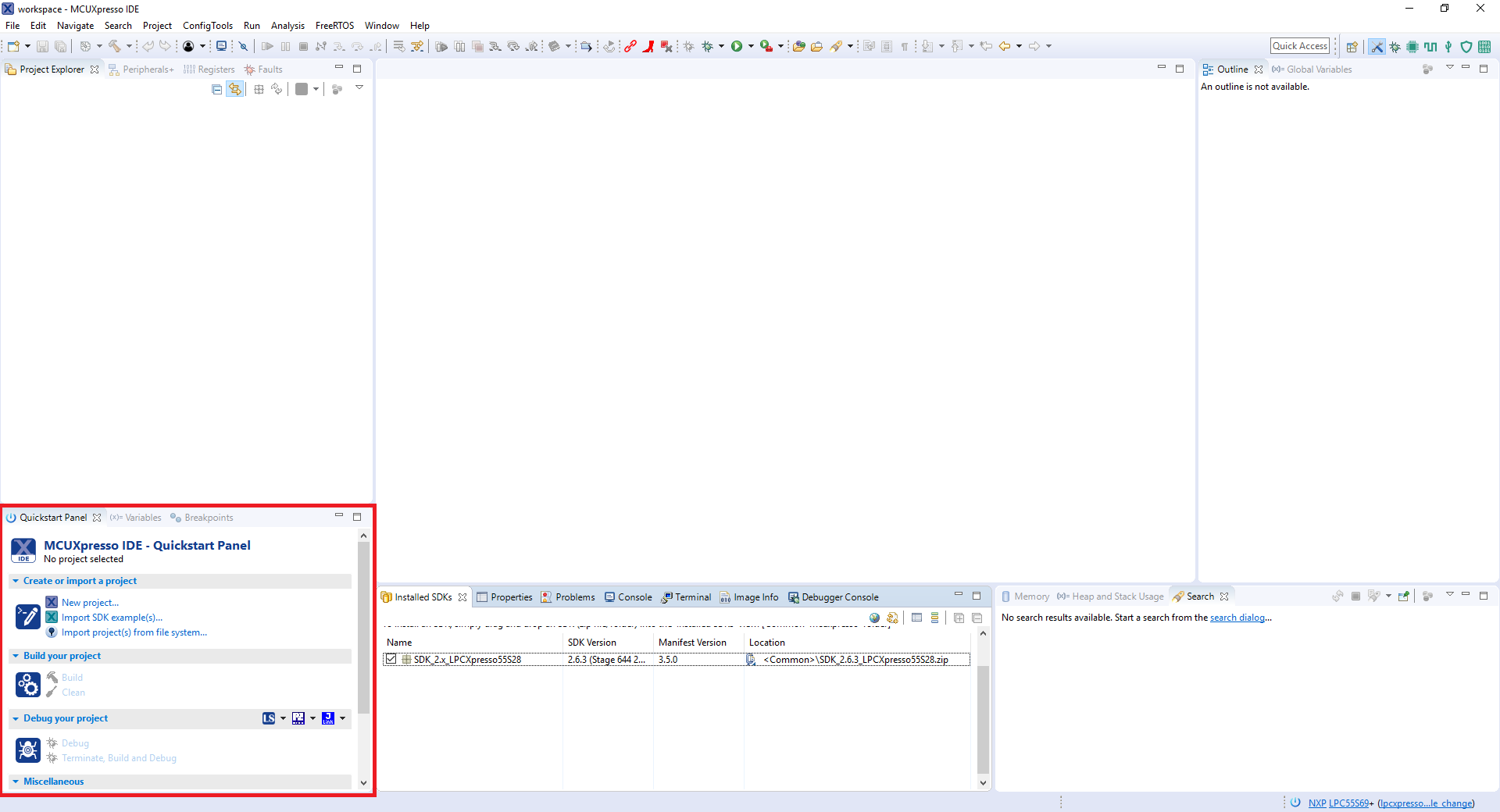
- インストールされたSDKは、以下に示すように[Installed SDKs(インストール済みSDK)]ビューに表示されます。
- 左下隅にあるクイックスタート・パネルを確認します。
- その中の[Import SDK example(s)...(SDKサンプルのインポート)]をクリックします。
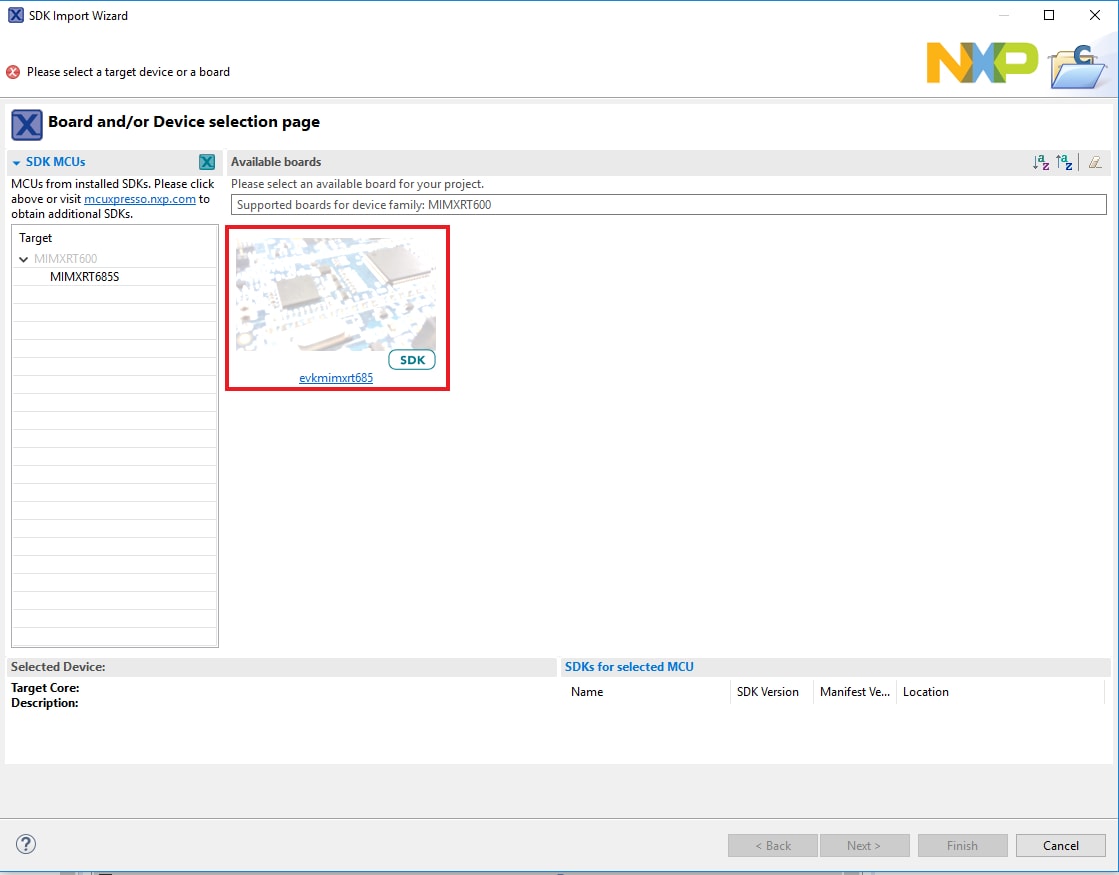
- サンプルをインポートして実行させるボードとして「evkmimxrt685ボード」をクリックして選択し、[Next(次へ)]をクリックします。
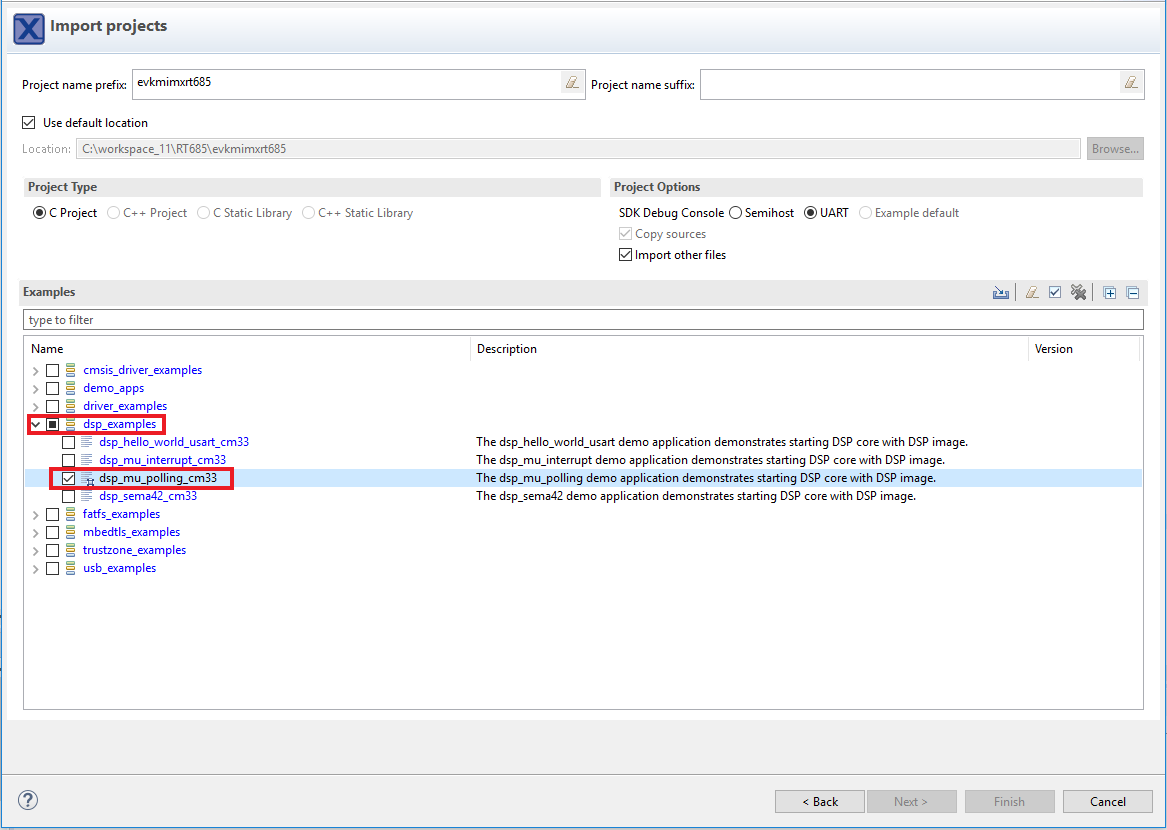
- 矢印ボタンを使用して[dsp_examples]カテゴリを展開したら、dsp_mu_polling_cm33の横にあるチェックボックスをクリックしてそのプロジェクトを選択します。出力用にデフォルトのセミホスティングではなくUARTを使用するには、[Project Options(プロジェクト・オプション)]にある[SDK Debug Console(SDKデバッグ・コンソール)]のチェック・ボックスで[UART]を選択します。次に、[Finish(完了)]をクリックします。
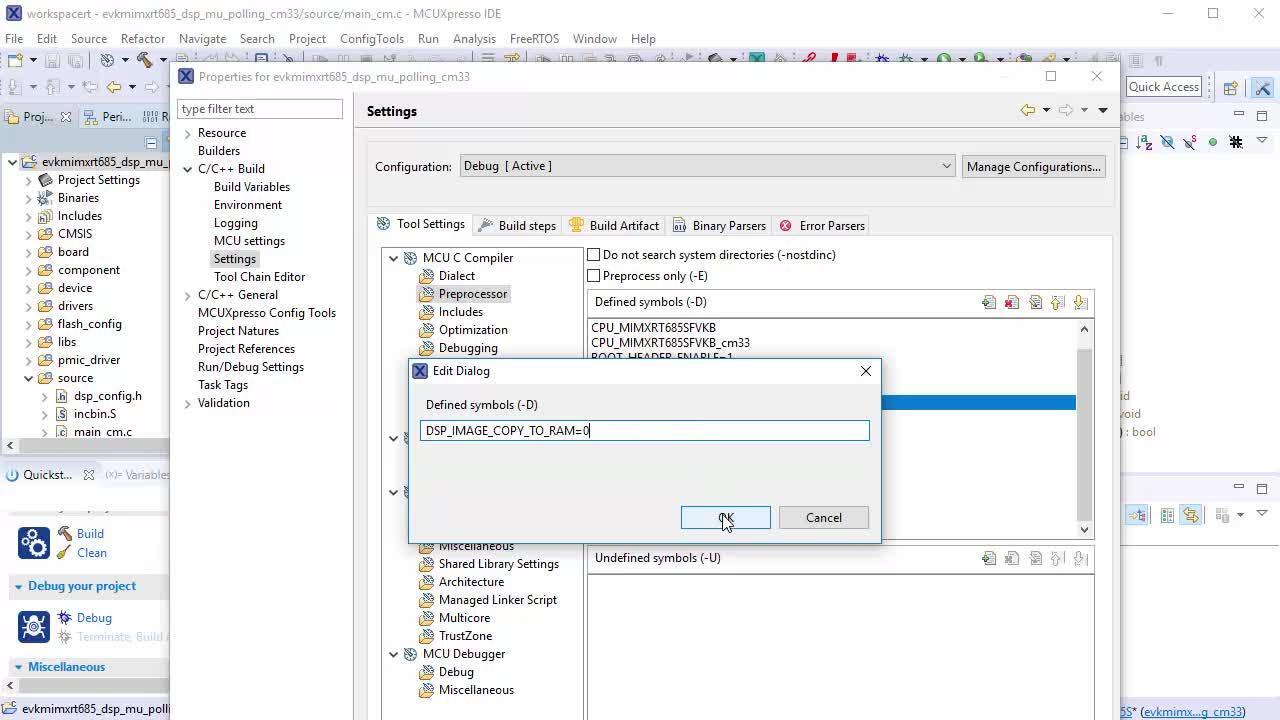
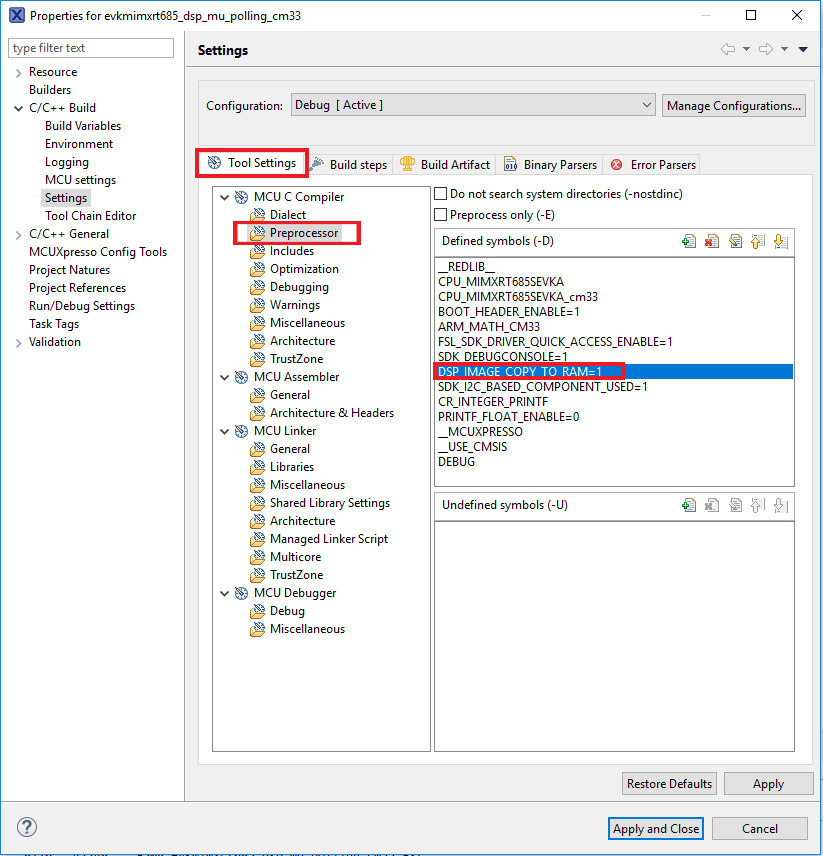
- DSP_IMAGE_COPY_TO_RAMマクロの値を確認します。これを行うには、プロジェクトを右クリックしてプロジェクトの[Properties(プロパティ)]に移動します。
- [C/C++ Build(C/C++のビルド)]オプションを開き、 [Settings(設定)]を選択します。
- [Tool Settings(ツール設定)]にある「Preprocessor(プリプロセッサ)」フォルダを選択し、[DSP_COPY_IMAGE_TO_RAM]の値を0に変更します。
- [Apply and Close(適用して閉じる)]をクリックします。
- 「incbin.Sファイル」を開いて、同じマクロを編集します。
- プロジェクトを選択し、ビルドします。
- プロジェクトが問題なくビルドされます。
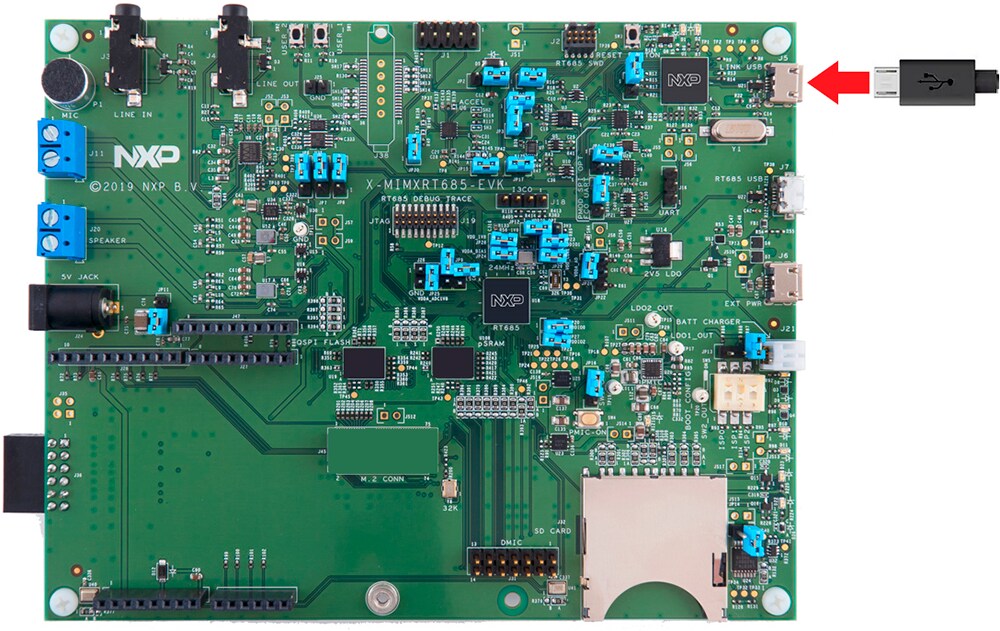
- micro USBをJ5「LINK USB」ポートに挿入し、ボードをコンピュータに接続します。
- アプリケーションをMIMXRT685-EVKにダウンロードします。
- J-Linkデバッグ・プローブを選択します。
- アプリケーションを実行します。












DSPアプリケーションのビルド
次の手順では、DSP向けにXtensa Xplorer IDEを使用したmu_pollingアプリケーションについて説明します。Xtensa Xplorer IDEのインストールについては、このスタート・ガイドのセクション「2. ソフトウェアの入手」に記載されています。
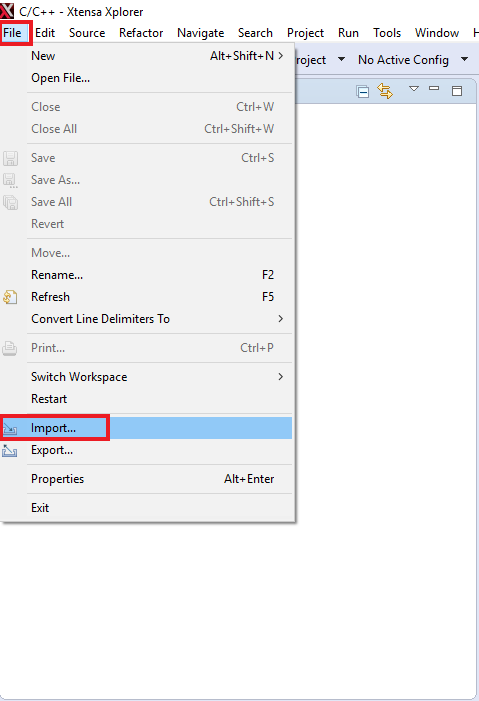
- Xtensa Xplorer IDEを開きます。
- 「mu_polling」デモをワークスペースにインポートします。[File(ファイル)]>[Import(インポート)]の順に選択します
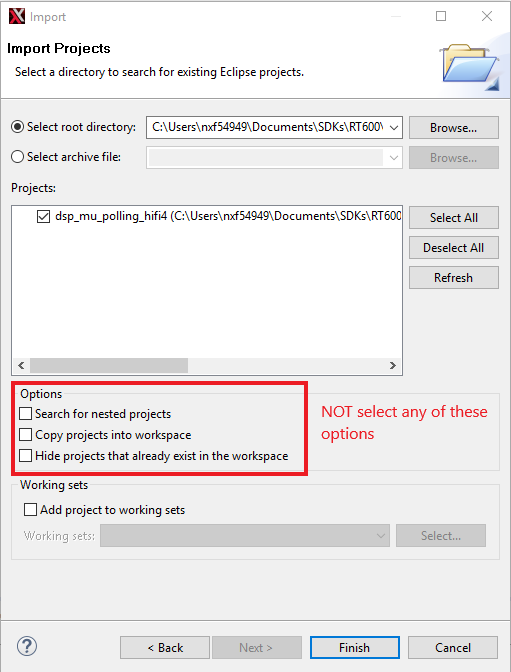
- [Existing Projects into Workspace(既存のプロジェクトをワークスペースへ)]を選択します。
- [Browse(参照)]ボタンを使用し、SDKの「mu_polling dsp demo」を選択します。SDKへのパス名にスペースが含まれていないことを確認してください。
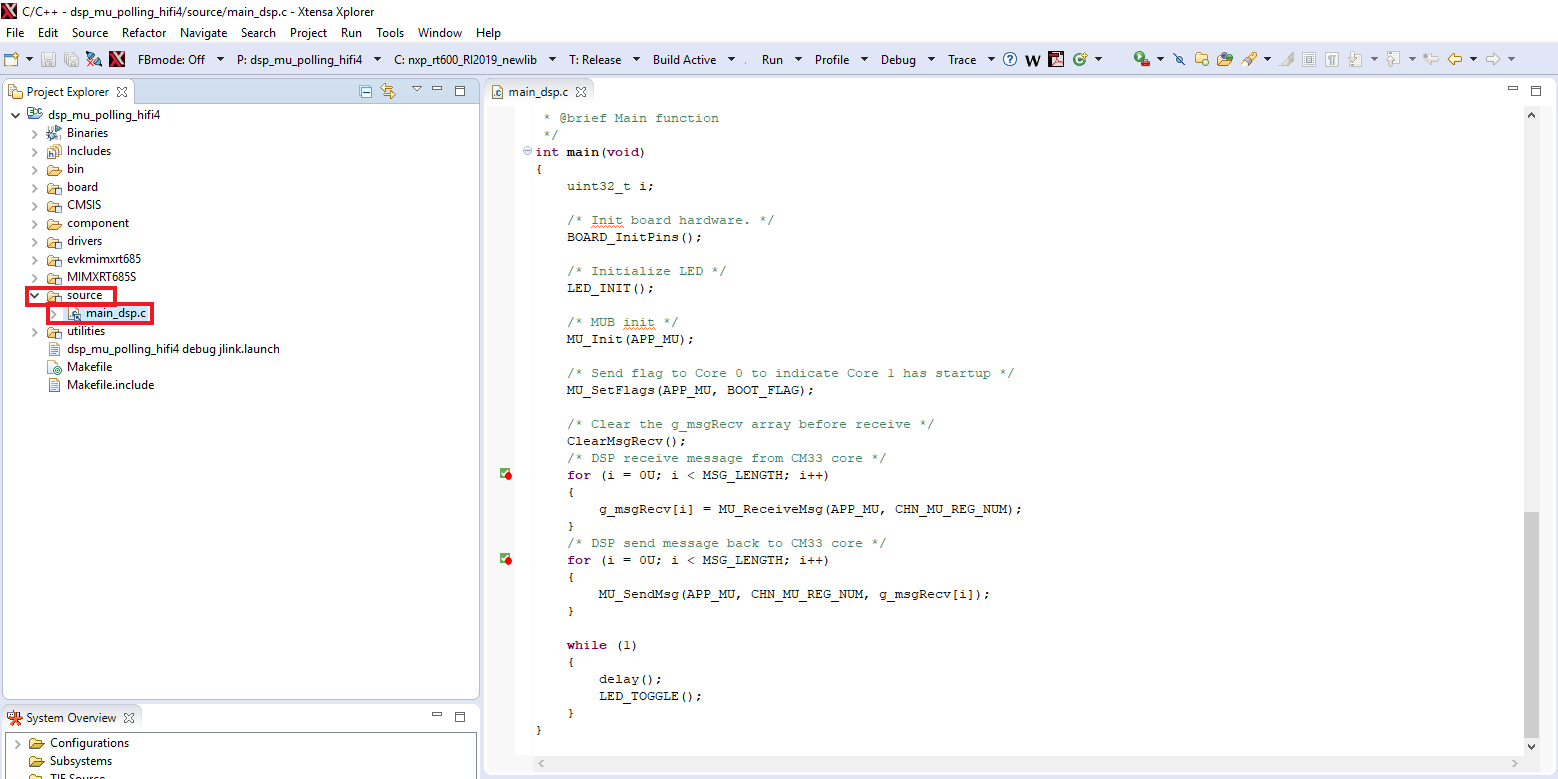
パスは次のとおりです。 - インポートが完了すると、プロジェクト・エクスプローラに「dsp_mu_polling_hifi4」が表示されます。このプロジェクトには、DSPのコードが含まれています。main関数は[source(ソース)]>[main_dsp.c]で確認できます。
- DSPアプリケーションをビルドするには、次の構成を設定する必要があります(メニュー・バーのドロップダウン・ボタンを使用します)。
- [Build Active(アクティブをビルド)]ボタンをクリックしてアプリケーションをビルドします
- ビルドが正常に完了するはずです。エラーが発生した場合は、SDKのディレクトリ・パスにスペースが含まれていないことを確認してください。
- C:\Program Files (x86)\Tensilica\Xtensa OCD Daemon 14.01でコマンド・プロンプトを開き、xt-ocd.exe -c topology.xmlコマンドを実行します。次のように表示されます。
- PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、事前に確認したデバッグCOMポートに接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115200
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
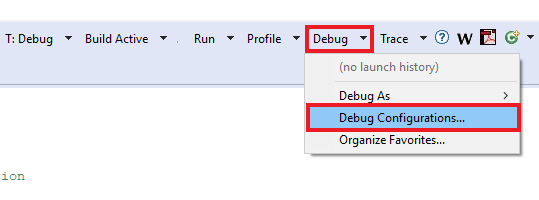
- Xtensa Xplorer IDEに移動し、[Debug(デバッグ)]の動作設定ボタンを使用して、[Debug Configuration(デバッグの構成)]を開きます。
- 「dsp_mu_polling Xtensa On Chip Debug」を選択してください。その後、[Debug(デバッグ)]をクリックします。
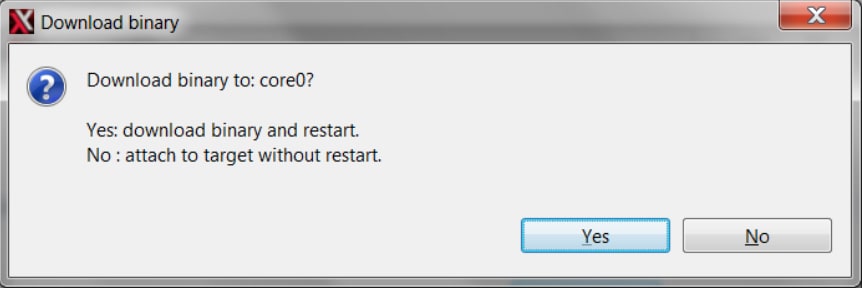
- 新しいウィンドウが開き、アプリケーションをコア0にダウンロードするかどうかの確認メッセージが表示されます。[Yes(はい)]をクリックします。
- Xtensa Xplorerがデバッグ画面に切り替わります。
- [Resume(再開)]ボタンをクリックしてプロジェクトを開始します。
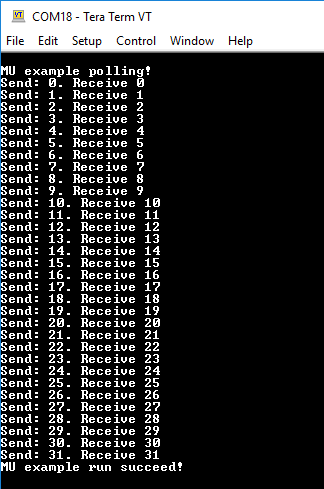
- LED D9が点滅し、ターミナルで以下のように表示されます。
- Xtensa Xplorer IDEでのデバッグ・セッションを停止するには、[Terminate(終了)]ボタンをクリックします
- CM33アプリケーションを実行しているIDEのデバッガを停止します。

1 \boards\evkmimxrt685\dsp_examples\mu_polling\dsp 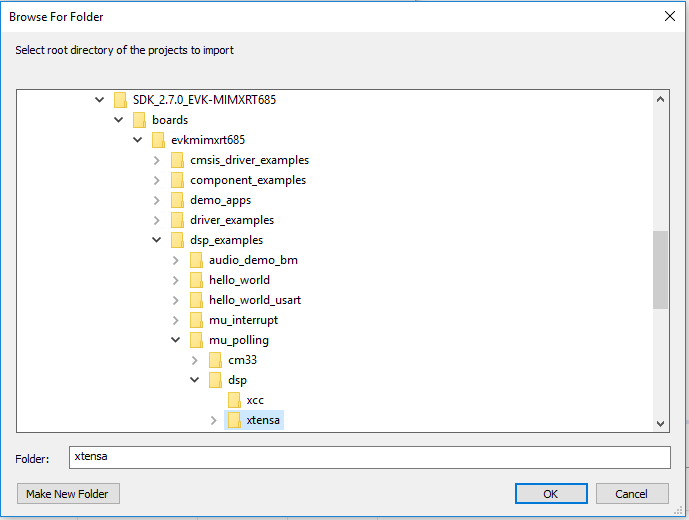







IAR EWARMを使用する
サンプル・アプリケーションのビルド
次の手順に従ってmu_pollingアプリケーションを開きます。このアプリケーションのコードは、Cortex M33コアとDSPコアの両方に対応します。以下の手順では、Cortex M33コアのコンパイルとデバッグの手順を取り上げています。DSPコードのコンパイルとデバッグの手順については、「MCUXpresso IDEを使用する」チュートリアルのセクション2に記載されています。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
- 最初に、http://iar.com/mypagesのサイトにあるIAR EWARM 8.50.1用のIARパッチをインストールします。これにより、NXP i.MXRT600フラッシュローダのサポートが追加されます。このパッチは、IARのWebサイトにログインした後、「Find Update(アップデートの検索)」をクリックすると見つけることができます。
- 次に、以前にダウンロードしたSDKパッケージを解凍します
-
目的のサンプル・アプリケーション・ワークスペースをまだ開いていない場合はここで開きます。ほとんどのサンプル・アプリケーション・ワークスペースのファイルは、次のパスに置かれています。
1
/boards/ / / /iar hello_worldデモの例では、パスは次のようになります。
1
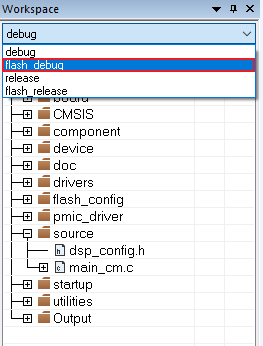
/boards/evkmimxrt685/dsp_examples /mu_polling/cm33/iar - ドロップダウン・リストから、目的のビルド・ターゲットを選択します。ここでは、[dsp_mu_polling_cm33 – debug(デバッグ)]ターゲットを選択します
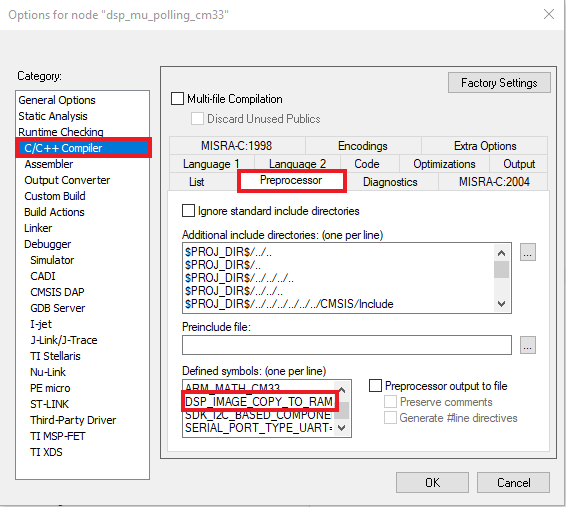
- DSP_IMAGE_COPY_TO_RAMマクロの値を0に変更します。プロジェクトを右クリックして[Options(オプション)]を選択し、プロジェクトのプロパティを開きます

- [C/C++ Compiler(C/C++コンパイラ)]をクリックし、[Preprocessor(プリプロセッサ)]を選択します。DSP_IMAGE_COPY_TO_RAMを0に変更します
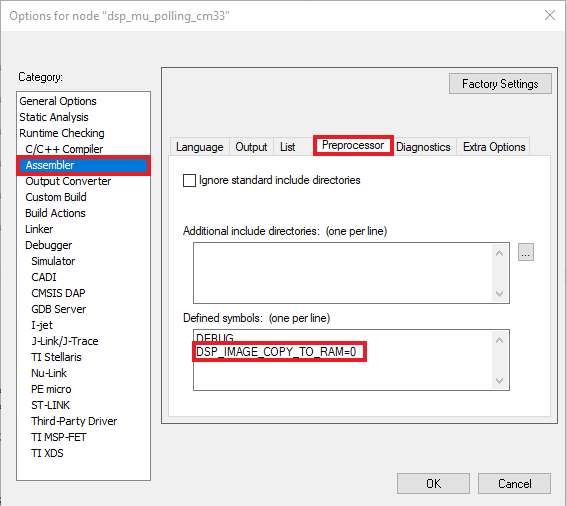
- [Assembler(アセンブラ)]に移動し、[Preprocessor(プリプロセッサ)オプションを選択して、同じマクロを変更します。
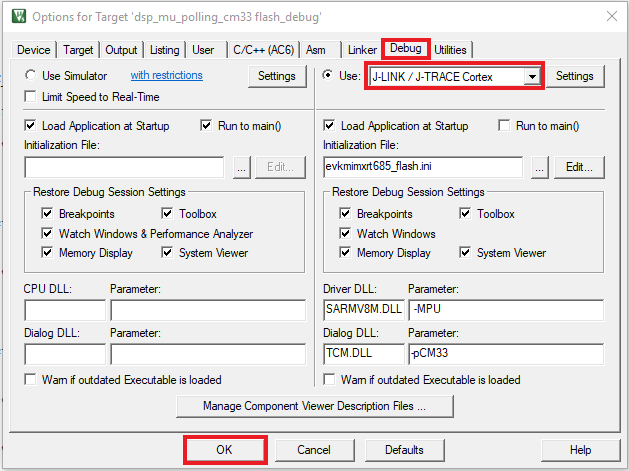
- [Debugger(デバッガ)]セクションに移動し、デバッガ・ドライバを「Jlink」に変更します。[OK]ボタンをクリックします
- アプリケーションをビルドするには、下の図で赤色でハイライト表示されている[Make(作成)]ボタンをクリックします

-
ビルドが正常に完了します

サンプル・アプリケーションの実行
ボードのLPC-Link2回路は、スタート・ガイド・ウェブサイトのステップ 2.4「LPCScrypt」で、J-Linkインターフェースが使用されるようにアップデートする必要があります。まだアップデートしていない場合には、J-Linkインターフェースが使用されるようにボードのデバッグ回路ファームウェアをLPCScryptでアップデートする方法について、スタート・ガイド・ウェブサイトの該当セクションを参照してください。
- USBケーブルを使って、PCを開発プラットフォームの
J5「Link USB」に接続します。ボードの電源投入時にDFULinkジャンパ (JP1) が取り外されていることを確認します
- [Download and Debug(ダウンロードとデバッグ)]ボタンをクリックして、アプリケーションをターゲットにダウンロードします。

- アプリケーションがターゲットにダウンロードされると、自動的にmain()関数まで実行されます
- [Go(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが開始されます

- mu_polling_cm33アプリケーションが実行されています
DSPアプリケーションのビルド
このアプリケーションのDSP部分のコードのビルドやデバッグを行うには、「MCUXpresso IDEを使用する」チュートリアルを開き、「2. DSPアプリケーションのビルド」以降の手順に従います。
Keil MDKを使用する
CMSISデバイス・パックのインストール
MDKツールをインストールした後、デバッグ目的でデバイスを完全にサポートするには、CMSIS (Cortex® Microcontroller Software Interface Standard) デバイス・パックをインストールする必要があります。このパックには、メモリ・マップ情報、レジスタ定義、フラッシュ・プログラミング・アルゴリズムなどが含まれています。下記の手順に従って、適切なCMSISパックをインストールしてください。
- µVisionという名前のMDK IDEを開きます。IDEで[Pack Installer(パック・インストーラ)]アイコンを選択します

- [Pack Installer(パック・インストーラ)]ウィンドウで「imxrt685」を検索し、LPC55S28ファミリを表示させます。MIMXRT685Sの名前をクリックすると、右側に「NXP::MIMXRT685S_DFP pack」と表示されます。パックの横にある[Install(インストール)]ボタンをクリックします。このプロセスを正常に完了するには、インターネット接続が必要となります
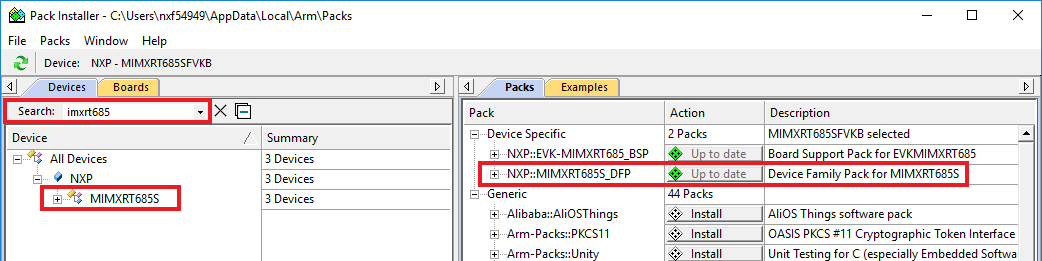
- インストールが完了したら、[Pack Installer(パック・インストーラ)]ウィンドウを閉じて、µVision IDEに戻ります
サンプル・アプリケーションのビルド
次の手順に従ってmu_pollingアプリケーションを開きます。このアプリケーションのコードは、Cortex M33コアとDSPコアの両方に対応します。以下の手順では、Cortex M33コアのコンパイルとデバッグの手順を取り上げています。DSPコードのコンパイルとデバッグの手順については、「MCUXpresso IDEを使用する」チュートリアルのセクション2に記載されています。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
-
目的のデモ・アプリケーション・ワークスペースをまだ開いていない場合は以下で開きます。
1
/boards/ / / /mdk ワークスペース・ファイルの名前は、
.uvmpwです。今回の例の場合、実際のパスは次のようになります。 1
/boards/evkmimxrt685/dsp_examples/mu_polling/cm33/mdk/dsp_mu_polling_cm33.uvmpw - デバッグの構成を選択します

- プロジェクトを右クリックし、プロジェクトのオプションを選択します。

- [C/C++]オプションを選択し、DSP_IMAGE_COPY_TO_RAMを0に変更します

- [Asm]オプションを開き、同じマクロを0に変更します

- 次に、[Debug(デバッグ)オプションに移動し、「J-LINK」を選択します。[OK]ボタンをクリックします
- デモ・プロジェクトをビルドするには、[Rebuild(リビルド)]ボタン(赤色でハイライト表示)を選択します

- ビルドが正常に完了します
サンプル・アプリケーションの実行
ボードのLPC-Link2回路は、スタート・ガイド・ウェブサイトのステップ 2.4「LPCScrypt」で、J-Linkインターフェースが使用されるようにアップデートする必要があります。まだアップデートしていない場合には、J-Linkインターフェースが使用されるようにボードのデバッグ回路ファームウェアをLPCScryptでアップデートする方法について、スタート・ガイド・ウェブサイトの該当セクションを参照してください。
- USBケーブルを使って、PCを開発プラットフォームのJ5「Link USB」に接続します。ボードへの電源投入時にDFULinkジャンパ (JP1) が取り外されていることを確認して、内部フラッシュからデバッグ・プローブを起動します

- アプリケーションが正しくビルドされたら、[Download(ダウンロード)]ボタンをクリックして、アプリケーションをターゲットにダウンロードします

- [Start/Stop Debug Session(デバッグ・セッションの開始/停止)]をクリックしてデバッグ・ビューを開きます

- [Run(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが開始されます

- mu_polling_cm33アプリケーションが実行されています
DSPアプリケーションのビルド
このアプリケーションのDSP部分のコードのビルドやデバッグを行うには、「MCUXpresso IDEを使用する」チュートリアルを開き、「2. DSPアプリケーションのビルド」以降の手順に従います。
Arm GCCを使用する
ツールチェーンのセットアップ
ここでは、Arm GCCツールチェーンを使用してKSDKデモ・アプリケーションのビルドと実行を行う際に必要となるコンポーネントをインストールする手順について説明します。この手順はMCUXpresso SDKでサポートされているものです。Arm GCCツールの使用方法はさまざまですが、今回の例では、Windows環境に焦点を当てています。ここでは省略しますが、GCCツールは、Linux OSやMac OS Xの環境でも利用できます。
GCC Arm Embeddedツールチェーンのインストール
PuTTYをダウンロードし、インストーラを実行します。これは実際のツールチェーンです(コンパイラ、リンカなど)。Kinetis SDKリリース・ノートに記載されている、サポート対象の最新バージョンのGCCツールチェーンを使用する必要があります。
MinGWのインストール
MinGW (Minimalist GNU for Windows) 開発ツールは、サード・パーティ製のCランタイムDLL(Cygwinなど)に依存しないツール・セットを提供します。KSDKで使用されているビルド環境ではMinGWビルド・ツールを利用せず、MinGWとMSYSのベース・インストールを活用しています。MSYSは、Unix系のインターフェースと各種ツールを備えた基本シェルを提供します。
- 最新のMinGW mingw-get-setupインストーラをsourceforge.net/projects/mingw/files/Installer/からダウンロードします
- インストーラを実行します。インストール・パスとしては「C:\MinGW」を推奨しますが、他のどの場所にでもインストールできます
- [Basic Setup(基本セットアップ)]で「mingw32-base」と「msys-base」が選択されていることを確認します
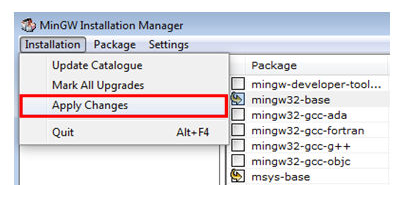
- [Installation(インストール)]メニューで[Apply Changes(変更を適用)]をクリックし、残りの手順に従ってインストールを完了します
- Windows OSのPath環境変数に適切なアイテムを追加します。これは、[Control Panel(コントロール・パネル)]>[System and Security(システムとセキュリティ)]>[System(システム)]>[Advanced System Settings(システムの詳細設定)]の[Environment Variables...(環境変数)]セクションで設定します。パスは次のとおりです。

1 \bin デフォルトのインストール・パスであるC:\MinGWを使用した例を以下に示します。パスが正しく設定されていないと、ツールチェーンは機能しません。

ARMGCC_DIR向けの新しい環境変数を追加する
新しいシステム環境変数を作成して、「ARMGCC_DIR」という名前を付けます。この変数の値で、Arm GCC Embeddedツールチェーンのインストール・パスを指定します。今回の例では、次のようになります。
1 C:\Program Files (x86)\GNU Tools Arm Embedded\ インストール・フォルダの正確なパス名については、GNU Arm GCC Embeddedツールのインストール・フォルダを参照してください。

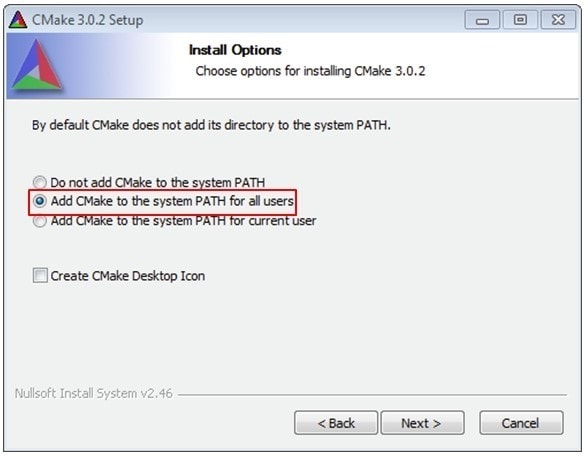
CMakeのインストール
-
CMake 3.0.xをダウンロードします
- CMakeをインストールします。インストール時には、必ず[Add CMake to system PATH(CMakeをシステムPATHに追加)]オプションを選択します。すべてのユーザーが使用できるパスにインストールするか、現在のユーザーのみが使用できるパスにインストールするかは、ユーザーが選択します。今回の例では、すべてのユーザーに対してインストールしています。
- インストーラの残りの手順に従います。
- PATHの変更を適用するには、システムの再起動が必要になる場合があります。
サンプル・アプリケーションのビルド
サンプル・アプリケーションをビルドする手順は次のとおりです。
- ファイル・エクスプローラで次のディレクトリを開き、
1
\boards\evkmimxrt685\dsp_examples\mu_polling\cm33\armgcc 「CMakeList.txt」ファイルを開きます
- 次の行を編集して、値を0に変更します。
1
SET(CMAKE_ASM_FLAGS_DEBUG "${CMAKE_ASM_FLAGS_DEBUG} -DDSP_IMAGE_COPY_TO_RAM=0") SET(CMAKE_C_FLAGS_DEBUG "${CMAKE_C_FLAGS_DEBUG} -DDSP_IMAGE_COPY_TO_RAM=0") - GCC Arm Embeddedツールチェーンのコマンド・ウィンドウが開いていない場合はここで開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]>[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します。 - サンプル・アプリケーションのプロジェクト・ディレクトリに移動します。パスは次のようになります。
- 5. コマンドラインで「build_debug.bat」と入力するか、Windows OSのエクスプローラで「build_debug.bat」ファイルをダブルクリックして、ビルドを実行します。次のような出力画面が表示されます。


1 /boards////armgcc このガイドの場合、実際のパスは次のようになります。
1 /boards/evkmimxrt685/dsp_examples/mu_polling/cm33/armgcc 
サンプル・アプリケーションの実行
GCCツールを使用するには、J-Linkデバッグ・インターフェースが必要となります。ボードのLPC-Link2回路は、スタート・ガイド・ウェブサイトのステップ 2.4「LPCScrypt」で、J-Linkインターフェースが使用されるようにアップデートする必要があります。まだアップデートしていない場合には、J-Linkインターフェースが使用されるようにボードのデバッグ回路ファームウェアをLPCScryptでアップデートする方法について、スタート・ガイド・ウェブサイトの該当セクションを参照してください。
- USBケーブルを使って、PCを開発プラットフォームのJ5「Link USB」に接続します。ボードの電源投入時にDFULinkジャンパ (JP1) が取り外されていることを確認します。
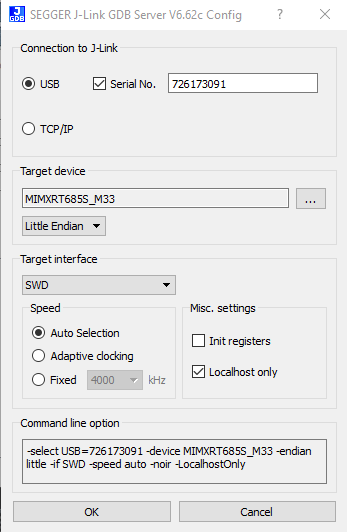
- J-Link GDBサーバ・アプリケーションを開きます。J-Linkソフトウェアがインストールされている場合、Windows OSの[スタート]メニューに移動し、[プログラム]>[SEGGER]>[J-Link
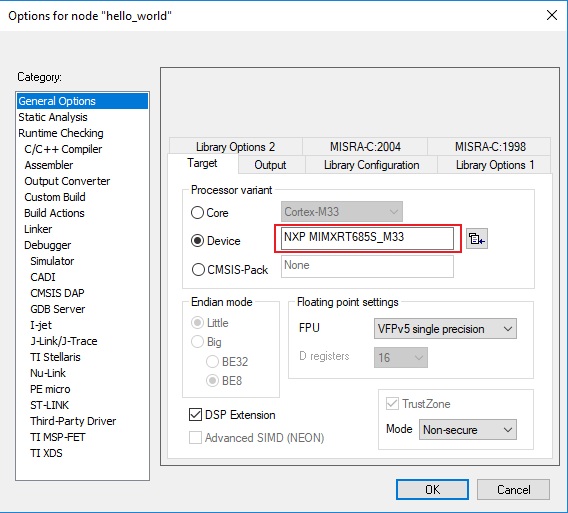
J-Link GDB Server]を選択するとアプリケーションを起動できます。 - 3. 次のように設定を変更します。この例で選択されているターゲット・デバイスは、「MIMXRT685S_M33」であり、SWDインターフェースを使用しています。
- 4. 接続すると、画面は次の図のようになります。
- 5. GCC Arm Embeddedツールチェーンのコマンド・ウィンドウが開いていない場合はここで開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]>[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します。 - 6. デモ・アプリケーションの出力を格納するディレクトリに変更します。出力は、選択したビルド・ターゲットに応じて、次のいずれかのパスに格納されます。
1
/boards/ / / /armgcc/debug 1
/boards/ / / /armgcc/debug 1
/boards/ / / /armgcc/release このガイドの場合、パスは次のようになります。
1
/boards/frdmk64f/demo_apps/hello_world/armgcc/debug - 「arm-none-eabi-gdb.exe
.elf」というコマンドを実行します。この例の場合、「arm-none-eabi-gdb.exe dsp_mu_polling_cm33.elf」というコマンドになります。 
- 8. 次のコマンドを実行します。
- 「target remote localhost:2331」
- 「load」
-
「monitor go」コマンドを実行すると、サンプル・アプリケーションが開始されます。
mu_polling cm33アプリケーションが実行されています。


DSPアプリケーションのビルド
DSPアプリケーションのビルドやデバッグを行うには、これと同じセクションにあるMCUXpressoチュートリアルの「2. DSPアプリケーションのビルド」の章の手順に従います。
4. SDKサンプルの変更

4.2 MCUXpresso SDKからのサンプル・プロジェクトのクローンを作成する
オプションA:MCUXpresso IDEを使用して、サンプル・プロジェクトのクローンを作成します。
MCUXpresso IDEを使用する
サンプル・アプリケーションのビルド
次の手順では、汎用出力の操作方法について説明します。このサンプルでは、スイッチ・ボタンとLEDを設定します。ボタンSW2を押すとLEDが点滅します。
- 左下隅にあるクイックスタート・パネルを確認します。
- その中の[Import SDK example(s)...(SDKサンプルのインポート)]をクリックします。
- サンプルをインポートして実行させるボードとして「evkmimxrt685ボード」をクリックして選択し、[Next(次へ)]をクリックします。
- 矢印ボタンを使用して「driver_examples」カテゴリを展開し、次に「sctimer」サンプルを展開したら、「sctimer_pwm_with_dutycycle_change」の横にあるチェックボックスをクリックしてサンプルを選択します。出力用にデフォルトのセミホスティングではなくUARTを使用するには、[Project Options(プロジェクト・オプション)]にある[SDK Debug Console(SDKデバッグ・コンソール)]のチェック・ボックスで[UART]を選択します。次に、[Finish(完了)]をクリックします。
- [Project Explorer(プロジェクト・エクスプローラ)]ビューで「evkmimxrt685_sctimer_pwm_with_duty_cycle_change」プロジェクトをクリックし、前述のようにデモをビルド、コンパイル、および実行します。
- 緑色のLEDの輝度が変化します。
- デバッグ・セッションを終了します。





オプションB:MCUXpresso Config Toolを使用して、サード・パーティ製IDEで使用するために既存のMCUXpresso SDKのサンプルのクローンを作成します。
MCUXpresso Config Toolsを使用する
次の手順では、汎用出力の操作方法について説明します。このサンプルでは、スイッチ・ボタンとLEDを設定します。ボタンSW2を押すとLEDが点滅します。
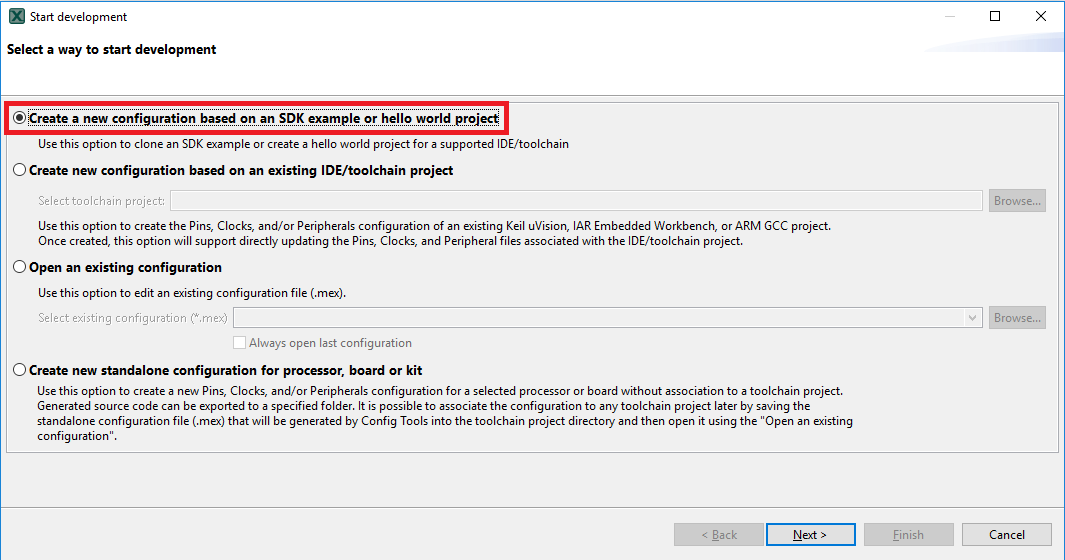
- MCUXpresso Config Toolsを開きます
- 表示されるウィザードで、[Create a new configuration based on an SDK example or hello world project(SDKサンプルまたはhello worldプロジェクトに基づいて構成を新規作成する)]ラジオ・ボタンを選択し、[Next(次へ)]をクリックします。
- 次の画面で、前に解凍したMCUXpresso SDKの場所を選択します。次に、使用中のIDEを選択します。SDKのビルド時にオンラインのSDKビルダで選択されたIDEのみが利用可能になることに注意して、[clone select example(選択したサンプルのクローン)]をクリックします。
- クローンの作成後、選択したディレクトリに移動し、IDEでプロジェクトを開きます。前のセクションで行ったように、プロジェクトをインポート、コンパイル、および実行します
- 緑色のLEDの輝度が変化します。
- デバッグ・セッションを終了します。
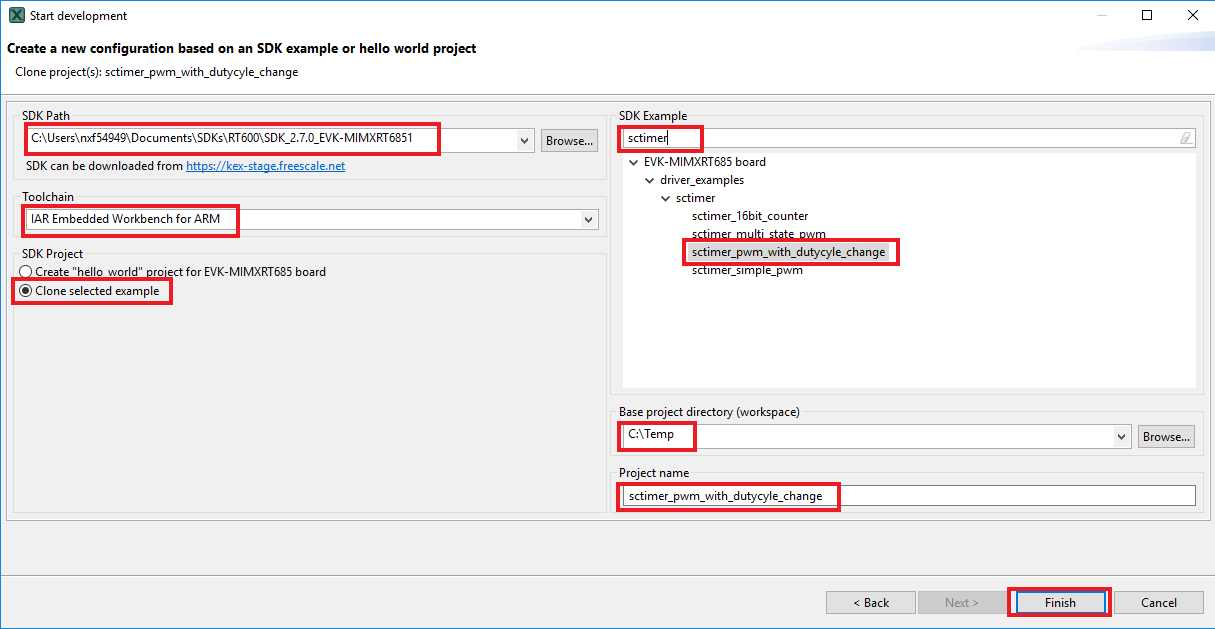
次に、クローンを作成するプロジェクトを選択します。この例では、GPIO LED出力プロジェクトを使用します。フィルタのボックスに「sctimer」と入力してプロジェクトを絞り込み、「sctimer_pwm_with_dutycycle_change」サンプル・プロジェクトを選択します。また、プロジェクトのクローンの作成先と名前を指定することもできます。[Finish(完了)]をクリックします。
4.3 ピン・ツールの使用
次に、MCUXpresso Config Toolsの一部であるピン・ツールを使用して、点滅しているLEDを異なるLEDに変更します。
ピン・ツールの使用
MCUXpresso IDEのピン・ツールを開くには
「evkmimxrt685_sctimer_pwm_with_dutycycle_change」プロジェクトを右クリックし、[MCUXpresso Config Tools]、[Open Pins(ピンを開く)]の順に選択することで、ピン・ツールを開きます。
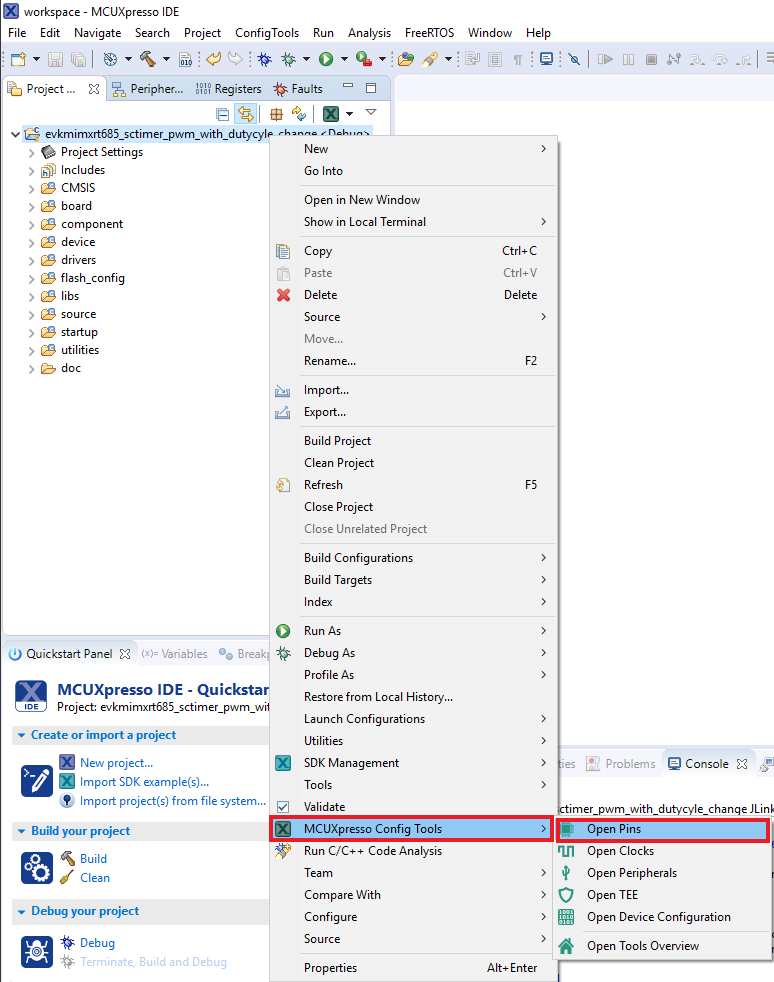
これで、ピン・ツールによってSCTプロジェクトのピン構成が表示されます。
MCUXpresso Config Toolsのピン・ツールを開くには
- MCUXpresso Config Toolsを開きます。
- 表示されるウィザードで、[Open existing configuration(既存の構成を開く)]ラジオ・ボタンを選択したら、クローンを作成したプロジェクトを選択し、[Next(次へ)]をクリックします。
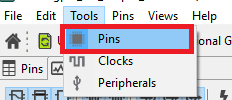
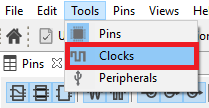
- ツールバーの[Tools(ツール)]>[Pins(ピン)]を選択して、ピン・ツールを開きます。
- これで、ピン・ツールによってSCTimerプロジェクトのピン構成が表示されます。


ピン・ツールを使用して、LEDがルーティングされたピンを変更する
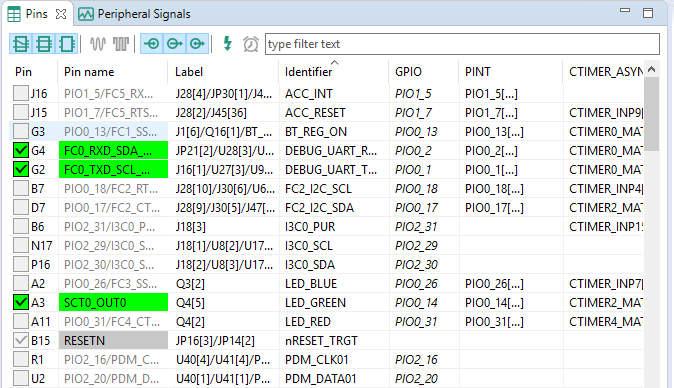
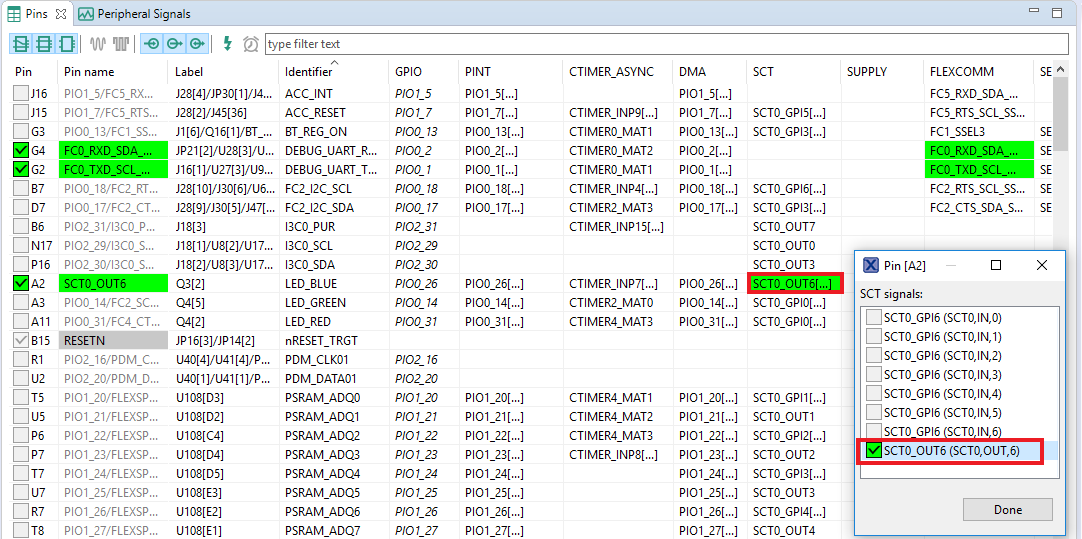
- 以降の手順ではMCUXpresso IDEを使用しますが、サード・パーティ製IDE向け MCUXpresso Config toolsの場合も同じ手順で実行できます。[Pins(ピン)]ビューの[Show not routed pins(ルーティングされていないピンを表示)]チェックボックスのチェックを外し、ルーティングされているピンのみを表示させます。この場合、デフォルトでルーティングされているピンも表示されます。ルーティングされたピンには、ピンの名称の横に緑色のボックスが表示されます。ルーティングされた各ピンに選択された機能は、緑色にハイライト表示されます。
- 現在の設定では、PIO0_14がSCT0_OUT0としてルーティングされています。PIO0_14を無効にし、SCT0_OUT6の機能を使用するためにPIO0_26のMUX設定を変更します。
- SCT列の下にある[SCT0_OUT0]フィールドをクリックして、PIO0_14を無効にします。これによりピンが無効になります(ピンのボックスのチェックが外れます)。したがってリストからも削除されます。
- 次に、PIO0_26をSCT_OUT6としてルーティングします。最初に、[Show not routed pins(ルーティングされていないピンを表示)]を選択し、すべてのピンを再表示させます。次に、[Pins(ピン)]ビューで「PIO0_26」を検索します。最後に、SCT列の[PIO0_26]ボックスをクリックします。ボックスが緑色でハイライト表示され、ピンの横にチェックが表示されます。
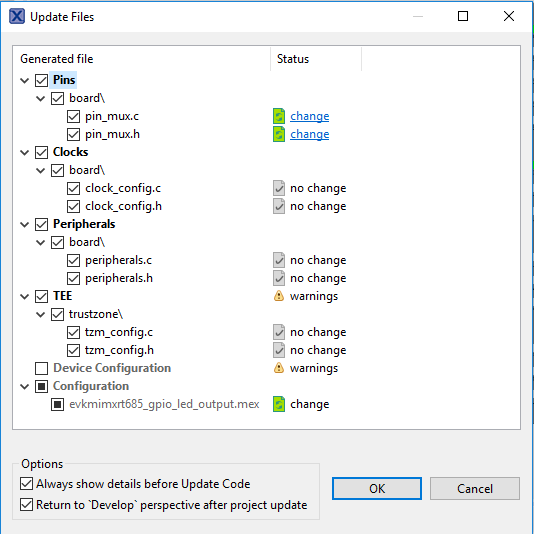
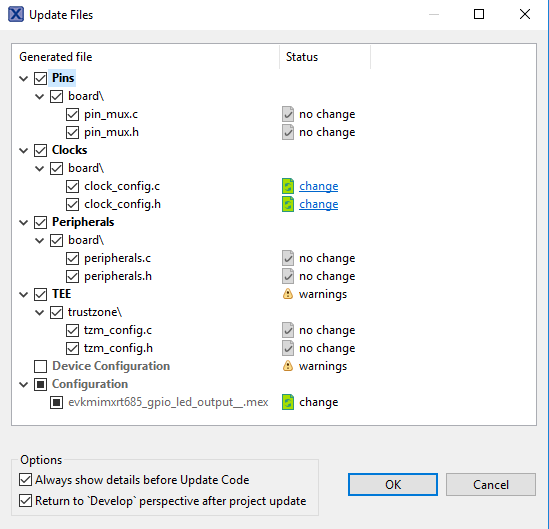
- 次に、ピン・ツールによって生成された、新たに更新されたpin_mux.cファイルとpin_mux.hファイルをエクスポートして、これらの変更をプロジェクトに実装します。メニュー・バーの[Update Project(プロジェクトの更新)]をクリックします。
- ポップアップ画面に変更中のファイルが表示されます。[diff]をクリックすると、現在のファイルとピン・ツールで生成された新しいファイルとの違いを確認できます。[OK]をクリックして、新しいファイルをプロジェクトに上書きします。
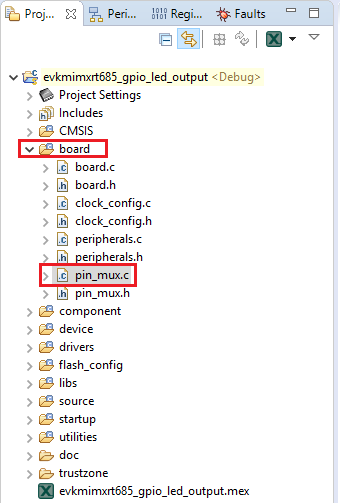
- 次に、IDE内で「Board(ボード)」フォルダの下にあるpinmux.cファイルを開きます。
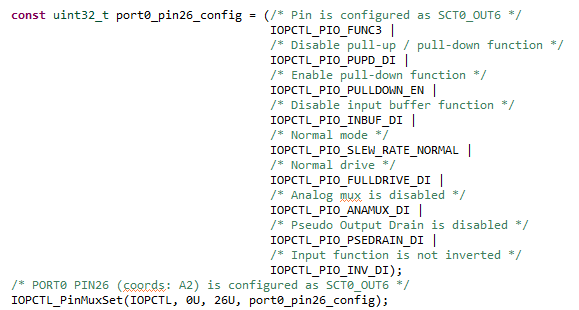
- ツールでsctルーティングピンを変更すると、PIO0_14が選択されてSCT_OUT (緑色のLED)として設定されたことに注意してください。これでPIO0_26の宣言が行われ、SCT_OUT(青色LED)として設定されました。
- sctimer_update_dutycycle.cファイルを開き、マクロDEMO_SCTIMER_OUTをkSCTIMER_Out_6に変更します。
- 前のセクションで行ったように、プロジェクトをビルドしてダウンロードします。
- アプリケーションを実行します。これにより、青色のLEDの輝度が変化します。
- デバッグ・セッションを終了します。



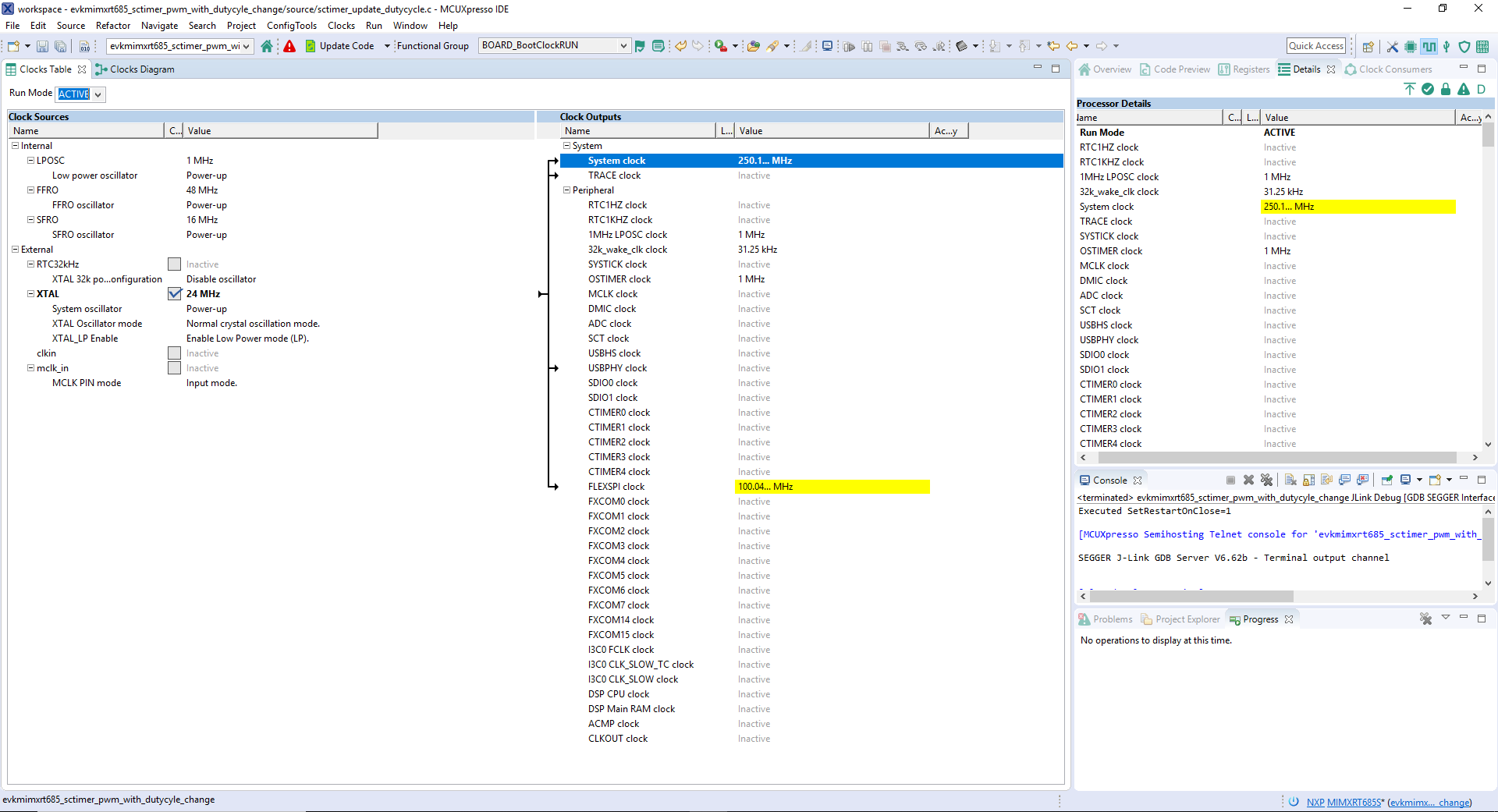
4.4 クロック・ツールの使用
次に、MCUXpresso Config Toolsの一部であるクロック・ツールを使用し、クロックの設定とLEDの点滅速度を変更します。
クロック・ツールの使用
MCUXpresso IDEのクロック・ツールを開くには
- 「evkmimxrt685_sctimer_pwm_with_dutycycle_change」プロジェクトを右クリックし、[MCUXpresso Config Tools]、[Open Clocks(クロックを開く)]の順に選択することで、クロック・ツールを開きます
- 表示されるウィザードで、[Open existing configuration(既存の構成を開く)]ラジオ・ボタンを選択したら、クローンを作成したプロジェクトを選択し、[Next(次へ)]をクリックします。

MCUXpresso Config Toolsのクロック・ツールを開くには
- MCUXpresso Config Toolsを開きます。
- ツールバーの[Tools(ツール)]>[clocks(クロック)]を選択して、クロック・ツールを開きます。
- これで、クロック・ツールによってプロジェクトのクロック構成が表示されます。


クロック・ツールを使用してシステム・クロックを変更する
- 以降の手順ではMCUXpresso IDEを使用しますが、サード・パーティ製IDE向け MCUXpresso Config toolsの場合も同じ手順で実行できます。左上隅のタブをクリックして[Clocks Diagram(クロック・ダイアグラム)]ビューに切り替えます。
- 機能グループの名前が「BOARD_BootClockRUN」になっていることを確認します。
- デフォルトでは、MIMXRT685は250 MHzで動作します。SYSCPUAHBCLKDIVフィールドをクリックして「/4 」オプションを選択し、コア・クロック周波数を125 MHzに変更します。この速度の低下に合わせて他のすべてのクロック周波数も自動的に変更されます。これが完了すると、次のようになります。
- 次に、新たに更新された「clock_mux.c」ファイルとピン・ツールによって生成された「clock_mux.h」ファイルをエクスポートして、これらの変更をプロジェクトに実装します。メニュー・バーの[Update Project(プロジェクトの更新)]をクリックします。
- ポップアップ画面に変更中のファイルが表示されます。[diff]をクリックすると、現在のファイルとクロック・ツールで生成された新しいファイルとの違いを確認できます。[OK]をクリックして、新しいファイルをプロジェクトに上書きします。
- 前のセクションで行ったように、プロジェクトをビルドしてダウンロードします。次のラインのclock_config.cで変更を確認できます。
- アプリケーションを実行します。LEDの輝度が徐々に変化します。
- デバッグ・セッションを終了します。




注:ヘッダーが変更されるため、ピン・ファイルも更新済みとしてタグ付けされる場合があります。

5. 学習
5.1 センサ
豊富な品揃えのNXPセンサ・ソリューションで、世界に目を向けましょう。NXPなら、加速度センサ、圧力センサ、タッチ・センサなど、プロジェクトに適したセンサ・ソリューションを見つけることができます。詳細については、NXPセンサ・ソリューションをご覧ください。
5.2 NFC
NFC (Near Field Communication) は、簡単なタッチだけで周りの世界とセキュアにやり取りできるシンプルで直感的なテクノロジです。NXPのNFCソリューションの詳細については、近距離無線通信 (NFC) をご覧ください。
5.3 RTおよびMCUXpressoコミュニティ
他のエンジニアとつながり、i.MXプロセッサとMCUXpressoのソフトウェアやツールを使用した設計に関して専門的なアドバイスを受けることができます。i.MX RTコミュニティ、MCUXpressoソフトウェアおよびツール・コミュニティという2つの専門コミュニティのいずれかで、コミュニティ・ディスカッションにご参加ください。
5.4 Wi-Fi®
i.MX RTプラットフォームを使用したNXP Wi-Fiモジュールのスタート・ガイド - Wi-Fiモジュールの動作テストを行いましょう。このガイドでは、Wi-Fiモジュールとi.MX RTプラットフォームを使用します。
ブート・オプション
ブート・オプション
アプリケーションが変更されると、MIMXRT685-EVKの青色のLEDが点滅します。
i.MX RTファミリは、さまざまなブート・ソースをサポートしており、メモリをオンチップまたは外部の宛先メモリにコピーするオプションに加え、いくつかのインターフェース向けのExecute in Place (XIP) を備えています。どのような選択肢があり、またご自身の設計に最適なものはどれであるのかをご確認ください。

| ドキュメントとビデオ | 説明 |
|---|---|
| AN12985 RT600のハイブリッド・ブート | コードをブート可能な状態でSRAMに格納する、またはフラッシュから直接実行するための方法についての詳細。コードのブート可能RAM部分と下位フラッシュに常駐するランタイム・コードの両方を使用して、フラッシュにプログラミングを行う手順などが含まれています。 |
| AN12773 シリアルNORフラッシュからのマスタ・ブートを可能にする方法 | このドキュメントでは、ブート可能イメージをシリアルNORフラッシュ・デバイスにプログラムし、i.MX RTをこのプライマリ・フラッシュ・デバイスからブートできるようにする方法について説明しています。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。ブート・オプションのいくつかの一般的な例を以下に挙げます。
OTAブートローダの例
Over-the-air (OTA) ブートローダは、外部メモリに常駐するセカンダリ・ブートローダで、アプリケーションのアップデートとブートをサポートします。
パス:
1/boards/evkbimxrt685/bootloader_examples TrustZoneの例
TrustZoneのパーティション分割と構成、セキュアGPIO、セキュリティで保護されたエラーを示す3つの例。
パス:
1/boards/evkbimxrt685/trustzone_examples 外部メモリ
| ドキュメントとビデオ | 説明 |
|---|---|
| AN13028 i.MX RTでのHyperRAM/PSRAMの高度な使用方法 | このアプリケーション・ノートでは、i.MX RT MCUでFlexSPIと組み合わせた場合のHyperRAM/PSRAMの高度な使用方法(i.MX RTでサポートされるFlexSPIプリフェッチ機能、HyperRAM/PSRAMのリフレッシュ間隔、HyperRAMデバイスなど)について説明しています。 |
| AN12773 シリアルNORフラッシュからのマスタ・ブートを可能にする方法 | このドキュメントでは、ブータブル・イメージをシリアルNORフラッシュ・デバイスにプログラムし、i.MX RTでこのプライマリ・フラッシュ・デバイスからのブートを可能にする方法について説明しています。 |
| AN12564 i.MX RTシリーズでのRead While Write (RWW) の実装 | i.MX RTシリーズにRWWの要件を実装する方法 |
| Adesto ECOXipとNXPのi.MX RTクロスオーバー・プロセッサの融合によるメモリ拡張 | 外部メモリによっていかにシステムのパフォーマンスと操作性が向上するかを概説しています。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。外部メモリに関するいくつかの一般的なサンプルを以下に挙げます。
OTAブートローダの例
Over-the-air (OTA) ブートローダは、外部メモリに常駐するセカンダリ・ブートローダで、アプリケーションのアップデートとブートをサポートします。
パス:
1/boards/evkbimxrt685/bootloader_examples FlexSPIポーリング転送サンプル
FlexSPIドライバと外部PSRAMまたはオクタル・フラッシュを使用してポーリングを行う方法。
パス:
1/boards/evkbimxrt685/driver_examples/flexspi/psram/polling_transfer パス:
1/boards/evkbimxrt685/driver_examples/flexspi/octal/polling_transfer DMA転送サンプル
FlexSPIドライバと外部PSRAMまたはオクタル・フラッシュを使用してDMAを行う方法。
パス:
1/boards/evkbimxrt685/driver_examples/flexspi/psram/dma_transfer パス:
1/boards/evkbimxrt685/driver_examples/flexspi/octal/edma_transfer セキュリティと整合性
i.MX RT685はセキュア・バイ・デザインであり、セキュアなシステム・オン・チップ (SoC) を駆動するセキュアなソフトウェアによってサポートされています。
| ドキュメントとビデオ | 説明 |
|---|---|
| 今日のセキュリティ要件を満たす:クロスオーバー・プロセッサでエンド・ツー・エンドのセキュリティを実現 | IoTのエンド・ノードとエッジ・ノードが満たすべき共通のセキュリティ目標と、エンド・デバイスで信頼の基点を実現するために必要な手順やツールについて説明します。 |
| AN12839 RT600のTrustZone | TrustZoneテクノロジ、RT600でTrustZoneのセキュアな状態と非セキュアな状態を設定する方法、およびこれらの状態を切り替えてさまざまなセキュリティで保護されたエラーに対応する方法について説明しています。 |
| AN12835 RT600のセキュアGPIOと使用方法 | セキュア・モードでのセキュアGPIOの使用および設定方法について説明しています。 |
| AN12834 RT600のハッシュ・エンジン | RT600でのSHAエンジンの使用方法と構成についてユーザーに紹介し、SHAエンジンを使用した場合の速度、メモリ、消費電力のパフォーマンス向上について実例で説明しています。 |
| AN12882 RT6xxを使用したAESによる暗号化/復号化 | SDK APIを使用してAESエンジンの設定とコードの記述を行い、付属のキーまたはPUF IPによって生成されたキーを使用してデータを暗号化および復号化する方法。PUF IPの設定と使用について説明しています。 |
| AN12445非対称暗号化アクセラレータCASPER | CASPER(RAM付き暗号化アクセラレータおよびシグナリング処理エンジン)ペリフェラルは、非対称暗号化アルゴリズムおよび特定の信号処理アルゴリズムの実行を高速化します。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。セキュリティと整合性に関するいくつかの一般的なサンプルを以下に挙げます。
Hashcryptサンプル
AESおよびSHAアルゴリズムを使用して平文を暗号化および復号化するKSDKソフトウェアを用いたデモ・プログラム。
パス:
1/boards/evkbimxrt685/driver_examples/hashcrypt CASPER暗号化アクセラレーション・サンプル
CASPERソフトウェア・ドライバを使用して冪剰余アルゴリズムを実装する方法。
パス:
1/boards/evkbimxrt685/driver_examples/casper PUFドライバ・サンプル
KSDKソフトウェアを使用し、PUFソフトウェア・ドライバでセキュア・キー・ストレージを実装するデモ・プログラム。
パス:
1/boards/evkbimxrt685/driver_examples/puf Mbedtlsサンプル
プログラムは、暗号化アルゴリズムのベンチマークとテストを実行します。オプションのmbedTLSミドルウェア・パッケージが必要です。
パス:
1/boards/evkbimxrt685/mbedtls_examples/ ツールとリファレンス
SPセキュア・プロビジョニング・ツール: i.MX RT上で起動可能な実行ファイルの生成およびプロビジョニングを簡単化するGUIベースのアプリケーション。
MbedTLS_lib API:このドキュメントでは、mbed TLSの内部構造について説明しています。
有線通信
| ドキュメントとビデオ | 説明 |
|---|---|
| NXPマイクロコントローラ用の有線通信ミドルウェア | MCUXpresso SDKで提供される有線通信ライブラリとサンプルについて説明しています。 |
| AN12796 RT600 I3Cのシンプル・マスタ | I3Cは、シンプルさ、少ないピン数、ボード設計の容易さ、マルチドロップ接続(point to point接続ではない)などのI2Cの特長と、高いデータレート、シンプルなパッド、低い消費電力というSPIの特長を兼ね備えたシリアル通信インターフェースです。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。ワイヤレス・コネクティビティに関するいくつかの一般的な例を以下に挙げます。
AWSサンプル
Amazon FreeRTOS認定 (AFQ)、デバイス設定、AWS Greengrass discovery、Androidモバイル・アプリケーションによるリモート・コントロール、shadow lightbulbのデモ。
パス:
1/boards/evkbimxrt685/aws_examples Wi-Fiサンプル
CLIサポートの使用例、iPerfネットワーク・パフォーマンス測定、Wi-Fiテスト・モード・サンプル、Wi-Fi設定ユーティリティのデモ。
パス:
1/boards/evkbimxrt685/wifi_examples ワイヤレス・コネクティビティ
| ドキュメントとビデオ | 説明 |
|---|---|
| NXPのワイヤレス・コネクティビティ | NXPの低消費電力でコスト効率に優れたワイヤレス・ソリューションのポートフォリオは、民生、スマート・エネルギー、産業、ヘルスケアなど、さまざまな分野におけるIoT (Internet of Things) のモニタリング/制御アプリケーションに対応します。 |
| クラウド・コネクティビティ | Amazon Web Services、Microsoft Azure、Google Cloud IoTなどのクラウド・サービスの統合サポート。 |
| i.MX RTプラットフォームを使用したNXP Wi-Fi®モジュールのスタート・ガイド | i.MX RT EVKでNXPのWi-Fi SoCを使用できるようにするサード・パーティのさまざまなモジュール。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。ワイヤレス・コネクティビティに関するいくつかの一般的な例を以下に挙げます。
AWSサンプル
Amazon FreeRTOS認定 (AFQ)、デバイス設定、AWS Greengrass discovery、Androidモバイル・アプリケーションによるリモート・コントロール、shadow lightbulbのデモ。
パス:
1/boards/evkbimxrt685/aws_examples Wi-Fiサンプル
CLIサポートの使用例、iPerfネットワーク・パフォーマンス測定、Wi-Fiテスト・モード・サンプル、Wi-Fi設定ユーティリティのデモ。
パス:
1/boards/evkbimxrt685/wifi_examples マルチコアおよびハードウェア・アクセラレーション
| ドキュメントとビデオ | 説明 |
|---|---|
| AN12789 RT600のデュアルコア通信およびデバッグ | RT600は、Arm® Cortex®-M33 CPUとCadence Xtensa HiFi4先進オーディオ・デジタル・シグナル・プロセッサCPUを搭載しています。このドキュメントでは、2つのCPU間の通信手段について説明します。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。パワー・マネジメントに関する一般的なサンプルを以下に挙げます。
セマフォ・ブロック・サンプル
Amazon FreeRTOS認定 (AFQ)、デバイス設定、AWS Greengrass discovery、Androidモバイル・アプリケーションによるリモート・コントロール、shadow lightbulbのデモ。
パス:
1 /boards/evkbimxrt685/dsp_examples/sema42 CASPER暗号化アクセラレーション・サンプル
CASPERソフトウェア・ドライバを使用して冪剰余アルゴリズムを実装する方法。
パス:
1 /boards/evkbimxrt685/driver_examples/casper/ CRCアクセラレーション・サンプル
Amazon FreeRTOS認定 (AFQ)、デバイス設定、AWS Greengrass discovery、Androidモバイル・アプリケーションによるリモート・コントロール、shadow lightbulbのデモ。
パス:
1 /boards/evkbimxrt685/driver_examples/crc MUサンプル
Amazon FreeRTOS認定 (AFQ)、デバイス設定、AWS Greengrass discovery、Androidモバイル・アプリケーションによるリモート・コントロール、shadow lightbulbのデモ。
パス:
1 /boards/evkbimxrt685/aws_examples パワーマネジメント
パワー・マネジメントには、デバイス固有の技術と、電源管理および低消費電力性能の最適化に関する情報が含まれます。
| ドキュメントとビデオ | 説明 | アプリケーション・ノートのソフトウェア |
|---|---|---|
| AN12801 FreeRTOSでの低消費電力サポート | i.MX RT6xxの低消費電力モード(ノーマル・スリープ、ディープ・スリープ、ディープ・パワーダウン、フルディープ・パワーダウンの各モード)をFreeRTOSのティックレス・パワー・モードに適用する方法。 | ダウンロード |
| AN12844 i.MX RT6xx DSPの消費電力と測定 | このドキュメントでは、低消費電力モードでのi.MX RT6xx DSPの消費電流に焦点を当てています。ユーザーによる電力使用の管理に役立つ機能について説明し、MIMXRT6xx EVKボードをベースとした電流測定についても記載しています。 | - |
| AN13056 低消費電力モードとウェイクアップ時間 | RT600シリーズの各種低消費電力モード、エントリおよびウェイクアップの実装、および各モードの電流およびウェイクアップ時間の測定方法について紹介しています。 | - |
| AN12790 RT600でのPMICの使用 | MIMXRT685-EVKはPCA9420パワー・マネジメントICを採用しているため、RT600の電源レールをアプリケーションのニーズに合わせて柔軟に構成できます。 | - |
オーディオ
| ドキュメントとビデオ | 説明 |
|---|---|
| NXPマイクロコントローラのオーディオ・ソフトウェア | 最先端の低消費電力オーディオ製品の開発に役立つUSB対応、基本的なオーディオ処理、およびパートナー・ソリューション。 |
| AN12762 HiFi4のオーディオ・プレーヤ | NXP i.MX RT600でオーディオ・プレーヤを開発する方法。 |
| AN12765 i.MX RT600のDSPの活用 | このドキュメントでは、i.MX RT600に搭載されているCadence Xtensa HiFi4オーディオDSP プロセッサの特定のモジュールの使用方法の例を示しています。 |
| AN12749 RT600 HiFi4のI2S(IC間サウンド・バス)での送受信 | I2SとDMAを使用してオーディオを録音および再生する方法、およびコーデック・チップを使用してi.MX RT600 EVKのオーディオ・データを処理するプロセス。 |
| MCU Tech Minute:DSP ConceptsのAudioWeaverとi.MX RT865 MCUを使用した、USBオーディオのリファレンス・デザイン | i.MX RT685デュアルコアMCUプラットフォームでのAudioWeaverの動作を実例で説明しています。AudioWeaverは、開発者による組込みオーディオ製品の設計、開発、および実装を容易にし、市場への投入を迅速化します。 |
| i.MX RT600クロスオーバーMCUで低消費電力かつ高性能なオーディオと音声の市場投入を実現 | DSP ConceptのAudioweaverツールとライブラリが、いかにNXPのi.MX RT600 MCUのパフォーマンスを最大限に引き出し、かつオーディオ設計者によるアルゴリズム・レベルからの設計の迅速化を可能にするかを紹介しています。 |
MCUXpresso SDKサンプル
DMICサンプル
オーディオはDMICモジュールでサンプルに変換されます。これらのサンプルは、HWVAD(HW音声アクティビティ検出)、スリープからのウェイク、複数のDMICチャネルなど、DMICに関わる複数のユース・ケースを示します。
パス:
1/boards/evkbimxrt685/driver_examples/dmic オーディオのデモ
DSPコアを使用したオーディオ処理のデモを提供します。
パス:
1/boards/evkbimxrt685/dsp_examples/audio_demo_bm DSP XAFのデモ
DSPコア、Xtensa Audio Framework (SAF) ミドルウェア・ライブラリ、および選ばれたXtensaオーディオ・コーデックを使用したオーディオ処理のデモを提供します。
パス:
1/boards/evkbimxrt685/dsp_examples/xaf_demo I2Sサンプル
I2Sインターフェースを使用して録音や再生を行う方法。
パス:
1/boards/evkbimxrt685/driver_examples/i2s 音声
| ドキュメントとビデオ | 説明 |
|---|---|
| 音声処理 | 無料の音声認識テクノロジを含む、NXPのさまざまな音声制御およびコミュニケーション用ソフトウェアとソリューション。 |
| AN13065 TensorFlow Liteインターフェースでの性別音声認識 | このドキュメントでは、TensorFlowモデルで性別音声オーディオのサンプルと分類のトレーニングを行う手順について説明します。注:このアプリケーション・ノートはRT600に適用されますが、DSPの利点については取り上げていません。 |
MCUXpresso SDKサンプル
SDKには複数のサンプル、デモ、ドライバが含まれており、初めて使用する際に役立ちます。音声に関するいくつかの一般的な例を以下に挙げます。
キーワード・スポッティングの例
オーディオ・サンプルは、マイクロコントローラのキーワード・スポッティングに基づいて評価されます。(SDK 2.10以降およびオプションのeIQ®ミドルウェア・パッケージが必要です)。
パス:
1/boards/evkbimxrt685/eiq_examples/tensorflow_lite_micro_kws ツールとリファレンス
NXP EdgeReady MCUベースのAlexa音声サービス このソリューションは、i.MX RTクロスオーバーMCUを活用しており、開発者は迅速かつ簡単にAlexa音声アシスタント機能を自社製品に追加することが可能です。
機械学習
機械学習リソース
機械学習 (ML) は一般的に、人間が生み出した抽象概念の分類、認識、予測が求められる用途に幅広く対応します。画像認識、ジェスチャー認識、異常検出、音声のテキスト変換、テキストの音声変換、ASR、情景認識など、多くの例が挙げられます。ここでは、特に画像やビデオのストリームに適用されるNXP MLツールに焦点を当てます。音声とオーディオの各セクションでも、ここに含まれるサンプルを参照している場合があります。
| ドキュメントとビデオ | 説明 |
|---|---|
| eIQ MLソフトウェア開発環境 | これにより、NXPのMCU、i.MX RT クロスオーバーMCU、i.MXファミリSoCでMLアルゴリズムを使用できます。eIQソフトウェアには、推論エンジン、ニューラル・ネットワーク・コンパイラ、最適化されたライブラリが含まれています |
| i.MX機械学習ユーザー・ガイド | NXPのi.MX向けeIQTMツールキットは、NXPのマイクロコントローラとアプリケーション・プロセッサを対象とした機械学習向けのライブラリと開発ツールのセットです。 |
| i.MX RTにおけるeIQのスタート・ガイド | eIQをダウンロードしてMCUXpresso IDE、IAR、Keil MDKで実行する方法を紹介します。 |
| eIQファクト・シート | NXPのi.MXおよびMCU向けの機械学習ソフトウェア - ライブラリ、サンプル・アプリケーション、推論エンジン。 |
| i.MX RT向けeIQ Glowラボ | 手書き数字の認識モデルのサンプルを実行して、Glowニューラル・ネットワーク・コンパイラ・ツールの使用方法を学びます。以下に、このラボのステップ・バイ・ステップ・ビデオを紹介しています。 |
| eIQ Glow Ahead Of Time (AOT) ユーザー・ガイド | Glow AOTをダウンロードして使用を開始し、Glow AOTコンパイラで生成されたバンドルを統合したアプリケーションを作成する手順。 |
| Ahead Of Time (AOT) アプリケーション構築のためのGlowドキュメント | AOTでコンパイルされる実行ファイル・バンドルの作成に関する簡単な説明。 |
| i.MX RTでのeIQ転移学習ラボ | モデルに対して転移学習を実行し、i.MX RT1060プラットフォームでそのモデルを実行する方法を紹介しています。 |
| AN13001 Glowのメモリの分析 | Glowコンパイラによって生成されたGlowメモリ情報を理解し、特定のモデルに必要なメモリを計算する方法を紹介します。このコンパイラは、モデルの実行に必要な最小メモリ・サイズを測定するために使用できます。 |
| AN12766 Tensor Flow LiteのK-Meansクラスタリングを使用した、eIQによる異常検出 | 異常検出を使用した機械状態監視アプリケーションを実現する手順を紹介します。 |
| AN12781 CMSIS-NNライブラリを用いたMNISTデータセットでのCaffeモデルの開発 | MNISTデータセットの手書き数字でCaffeモデルをトレーニングするプロセスについて説明しています。(注:この文書におけるCMSIS-NNエンジンに関する箇所は、RT600に関連するものではありません)。トレーニングされたCaffeモデルは、i.MX RTプラットフォームで実行可能なソース・ファイルに変換されます。 |
| NXPのMCUで高度なインダストリアルMLアプリケーションが可能に | オブジェクト認識から異常検出までの幅広いビジョン、音声、センサ・テクノロジの実装に使用できるソフトウェア・ツールと、MCUXpresso SDK MLのサンプルを使用してすぐに設計を開始する方法に焦点を当てています。 |
MCUXpresso IDEターミナル・チュートリアル
MCUXpresso IDEターミナル・チュートリアル
最新バージョンのMCUXpresso IDEには、ターミナル・エミュレーション・アプリケーションが含まれています。このツールは、お使いのNXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示するために使用できます。
- MCUXpresso IDEを開きます
- MCUXpresso IDEの画面上部にある[Open a Terminal(ターミナルを開く)]ボタンをクリックするか、[Ctrl + Alt + Shift + T]を同時に押して、MCUXpresso IDEターミナルを起動します。
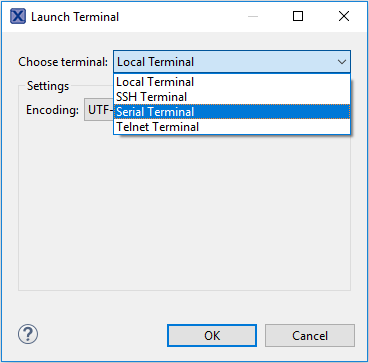
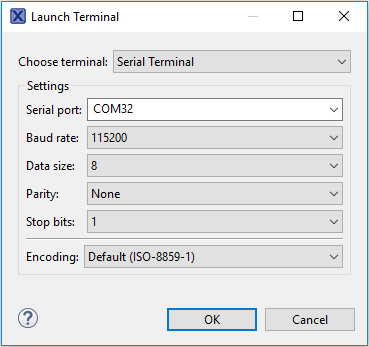
- シリアル・ターミナルを選択します
- シリアル・ポート(LPC-Link2のCOMポート番号を使用)をボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定し、[OK]ボタンをクリックします
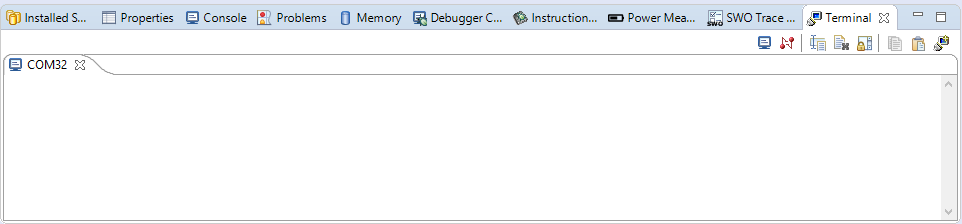
- 接続が確立されているか検証します。接続されている場合、MCUXpresso IDEの[Terminal(ターミナル)]ビューの表示は下図のようになります
- 以上で設定は完了です


Tera Termチュートリアル
Tera Termチュートリアル
Tera Termは、広く利用されているオープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- SourceForgeからTera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- Tera Termを起動します。初めて起動する際には、次のダイアログが表示されます。シリアル・オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます。
- 事前に確認したCOMポート番号を使用して、シリアル・ポートをボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]>[Serial Port(シリアル・ポート)]から行うことができます。
- 接続が確立されているか検証します。確立されている場合、Tera Termのタイトル・バーに以下のように表示されます。
- 以上で設定は完了です


Puttyチュートリアル
Puttyチュートリアル
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- 下のボタンをクリックしてPuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- 選択したダウンロードのタイプに応じて、ダウンロードした*.exeファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します。
- 表示されたウィンドウで設定を行い、[Serial(シリアル)]ラジオ・ボタンを選択して、事前に確認したCOMポート番号を入力します。ボーレートもあわせて指定します。今回は「115200」を入力します。
- [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しいCOMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます。
- 以上で設定は完了です

設計・リソース
サポート
次の段階に進むために、以下で適切な課題を見つけましょう。不明な点がある場合は、NXPサポートにお問い合わせください。
トレーニング
MCUXpresso IDEとMCUXpresso Config Toolsを使用した基本のアプリケーション開発 - この3部構成のビデオ・シリーズでは、インポートされたSDKサンプル・プロジェクトを使用する際や、新しいプロジェクトを作成する際における、MCUXpresso IDEとConfig Tools間の基本的なインタラクションについて取り上げています。
MCU Tech Minutes:i.MX RTシリーズの主な機能と利点 - i.MX RTシリーズの主な機能と利点のいくつかをショート・ビデオで紹介しています。
i.MX RT600トレーニング - この製品に関するNXPのオンデマンド・トレーニング、ハウツー・ビデオ、およびウェビナーの全リスト。